Columna Vertebral
(Diferencia entre revisiones)
| Revisión de 14:59 14 mar 2008 Edu (Discusión | contribuciones) ← Ir a diferencia anterior |
Revisión de 03:35 15 mar 2008 Edu (Discusión | contribuciones) Ir a siguiente diferencia → |
||
| Línea 23: | Línea 23: | ||
| --[[Usuario:Edu|Edu]] 12:59 14 mar 2008 (ARST) | --[[Usuario:Edu|Edu]] 12:59 14 mar 2008 (ARST) | ||
| ---- | ---- | ||
| + | |||
| + | |||
| + | |||
| + | Ver también: | ||
| + | |||
| + | * [[Guía de las partes del robot]] | ||
| + | * [[Esqueleto]] | ||
| [[Categoría:Mecánica]] | [[Categoría:Mecánica]] | ||
| [[Categoría:Biomecánica]] | [[Categoría:Biomecánica]] | ||
Revisión de 03:35 15 mar 2008
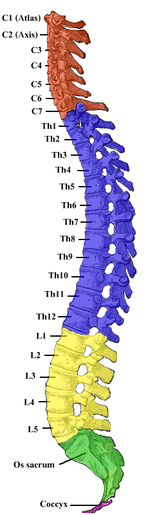
La columna vertebral o raquis o espina dorsal es una compleja estructura osteofibrocartilaginosa y articulada, en la parte dorsal del torso, que funciona principalmente como elemento de sostén, recubrimiento y protección de la médula espinal, y es uno de los factores que ayudan a mantener el centro de gravedad de algunos animales: los vertebrados. Consta de 33 piezas óseas que constituyen la columna vertebral, denominadas vértebras, las cuales están conformadas de tal manera que goza la columna de flexibilidad, estabilidad y amortiguación de impactos durante la moción normal del organismo.
--Adrian S.A. 17:22 13 mar 2008 (ARST)
Una inquietud:
¿Por qué tengo la impresión de que el torso del robot, entre el cuello y la cintura, debiera tener algunas uniones más para que pueda comportarse al estilo de la columna vertebral humana y ayudar al equilibrio?
De última, podríamos intentar plantearlas pero que no tengan, por el momento, ningún grado de libertad. ¿no?
--Adrian S.A. 18:26 13 mar 2008 (ARST)
De acuerdo. Se pueden dejar preparados los lugares de articulación. Si lo que es obvio que va a ser lo más pesado, la batería de alimentación, está apoyada debajo de la línea de giro de la cintura, es decir, cargando todo su peso sobre las caderas y piernas, en la cintura y en esas otras partes con alguna movilidad de la columna habrá menos esfuerzo mecánico que hacer, así que esos movimientos se podrían manejar con servos más comunes y menos costosos.
--Edu 12:59 14 mar 2008 (ARST)
Ver también: