

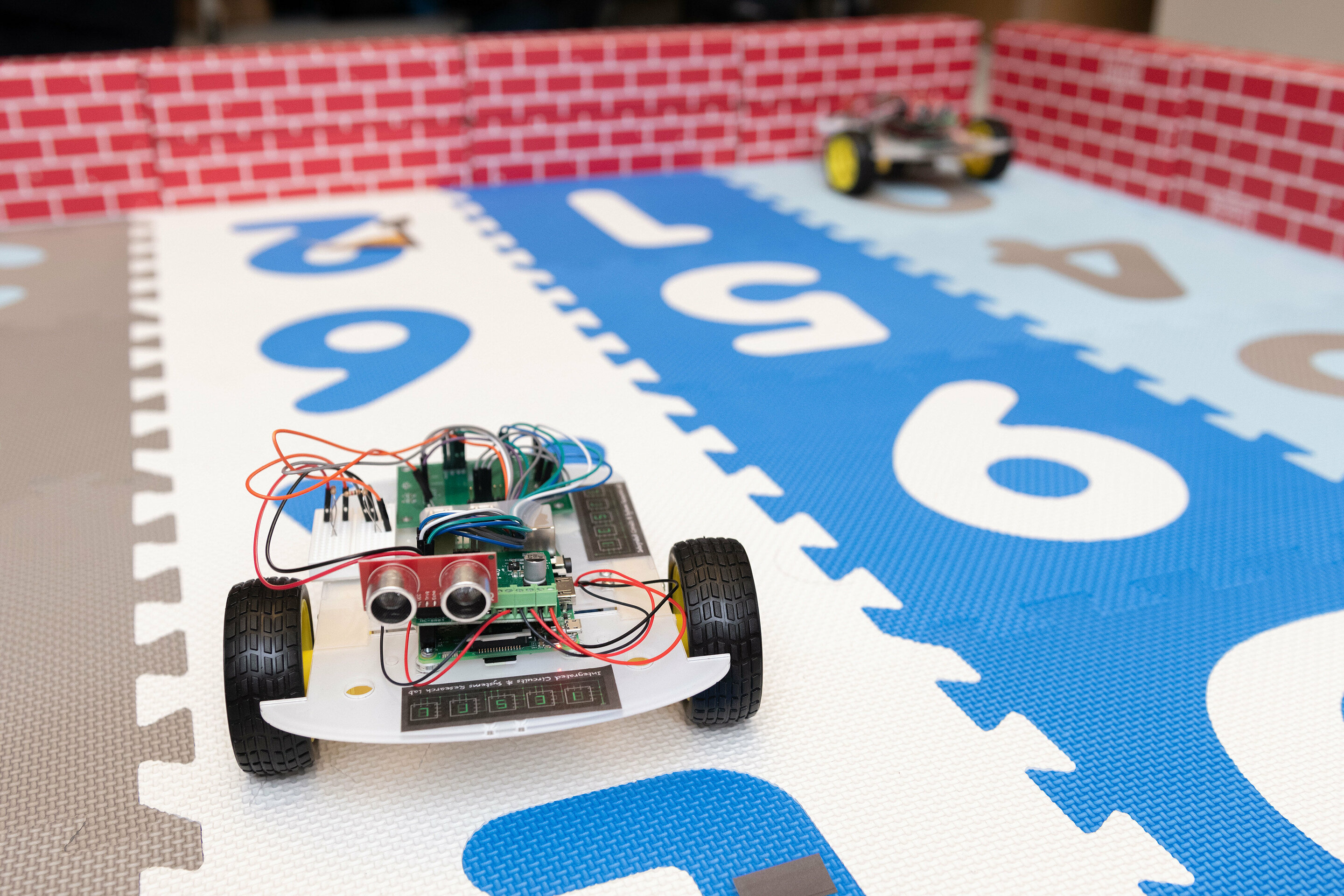
Se muestra un autom¾vil rob¾tico controlado por un chip hĒbrido de potencia ultra baja en una pista creada para demostrar su capacidad para aprender y colaborar con otro robot. Crķdito: Allison Carter, Georgia Tech
Un chip hĒbrido de potencia ultra baja inspirado en el cerebro podrĒa ayudar a que robots de tama±o peque±o puedan colaborar y aprender de sus experiencias. Combinado con las nuevas generaciones de motores y sensores de baja potencia, el nuevo Circuito Integrado de Aplicaci¾n EspecĒfica (ASIC = Application-Specific Integrated Circuit), que funciona con milivatios de potencia, podrĒa ser de ayuda para que los enjambres de robots inteligentes operen durante horas en lugar de minutos.
Para ahorrar energĒa, los chips utilizan un procesador hĒbrido digital/anal¾gico basado en dominio de tiempo (time domain), en el que la informaci¾n se codifica en el ancho de pulso de las se±ales. El circuito integrado de red neuronal se adapta tanto a la programaci¾n basada en modelos como al aprendizaje reforzado por colaboraci¾n, lo que podrĒa proporcionar a estos peque±os robots mayores capacidades de reconocimiento, b·squeda y rescate, y otras misiones.
Investigadores del Instituto de TecnologĒa de Georgia demostraron autos rob¾ticos conducidos por ASIC ·nicos en la Conferencia Internacional de Circuitos de Estado S¾lido (ISSCC) IEEE 2019. La investigaci¾n fue patrocinada por la Agencia de Proyectos de Investigaci¾n Avanzada de Defensa (DARPA) y la Corporaci¾n de Investigaci¾n de Semiconductores (SRC) a travķs del Centro para la Habilitaci¾n de Inteligencia Aut¾noma Inspirada en el Cerebro (CBRIC).
½Estamos tratando de poner inteligencia en estos robots tan peque±os para que puedan aprender sobre su entorno y moverse de forma aut¾noma, sin infraestructura╗, dijo Arijit Raychowdhury, profesor asociado de la Escuela de IngenierĒa Elķctrica e Informßtica de Georgia Tech. ½Para lograrlo, queremos incorporar dise±os de circuitos de baja potencia a estos dispositivos tan peque±os para que puedan tomar decisiones por su cuenta. Existe una gran demanda de robots muy peque±os pero capaces, que no requieren infraestructura╗.
Los autos demostrados por Raychowdhury junto a los estudiantes de posgrado Ningyuan Cao, Muya Chang y Anupam Golder navegan a travķs de una pista rodeada de almohadillas de goma y paredes de bloques de cart¾n. Mientras buscan un objetivo, los robots deben esquivar conos de trßfico y evitarse entre ellos, aprendiendo del entorno a medida que avanzan y se comunican continuamente.
Los autos utilizan sensores de inercia y ultrasonido para determinar su ubicaci¾n y detectar objetos a su alrededor. La informaci¾n de los sensores va al ASIC hĒbrido, que sirve como el ½cerebro╗ de los vehĒculos. Luego, las instrucciones van a un controlador Raspberry Pi, que es el que envĒa instrucciones a los motores elķctricos.
En los peque±os robot, tres sistemas principales consumen energĒa: los motores y controladores utilizados para conducir y dirigir las ruedas, el procesador y el sistema de detecci¾n. En los autos construidos por el equipo de Raychowdhury, que el ASIC sea de baja potencia significa que los motores consumen la mayor parte de ķsta. ½Hemos podido reducir la potencia de c¾mputo a un nivel en el que el cßlculo estß dominado por las necesidades de los motores╗, dijo.
El equipo estß trabajando con colaboradores en motores que utilizan tecnologĒa microelectromecßnica (MEMS) capaz de operar con mucha menos potencia que los motores convencionales.
½Quisiķramos construir un sistema en el que la potencia de detecci¾n, las comunicaciones y la potencia de la computadora y la actuaci¾n estķn aproximadamente al mismo nivel, del orden de cientos de milivatios╗, dijo Raychowdhury, quien es profesor adjunto de Semiconductores ON en la Escuela de IngenierĒa Elķctrica y Computaci¾n. ½Si podemos construir estos robots del tama±o de la palma de la mano con motores y controladores eficientes, deberĒamos poder obtener tiempos de operaci¾n de varias horas con un par de baterĒas AA. Ahora tenemos una buena idea de quķ tipo de plataformas informßticas necesitamos para ofrecer esto, pero todavĒa necesitamos los otros componentes para ponernos al dĒa╗.
ASIC
En la computaci¾n basada en time-domain, la informaci¾n se transporta en dos voltajes diferentes, codificados en el ancho de los pulsos. Eso le da a los circuitos las ventajas de eficiencia energķtica de los circuitos anal¾gicos con la robustez de los dispositivos digitales.
½El tama±o del chip se reduce a la mitad, y el consumo de energĒa es un tercio de lo que necesitarĒa un chip digital tradicional╗, dijo Raychowdhury. ½Usamos varias tķcnicas en los dise±os de l¾gica y memoria para reducir el consumo de energĒa al rango de milivatios (un milivatio es una milķsima de vatio), y al mismo tiempo cumplir con el objetivo de rendimiento╗.
Con cada ancho de pulso representando un valor diferente, el sistema es mßs lento que los dispositivos digitales o anal¾gicos, pero Raychowdhury dice que la velocidad es suficiente para estos robots peque±os.
½Para estos sistemas de control, no necesitamos circuitos que operen a m·ltiples gigahercios porque los dispositivos no se mueven tan rßpido╗, dijo. ½Estamos sacrificando un poco de rendimiento para obtener eficiencias energķticas extremas. Incluso si la computadora funciona a 10 o 100 megahercios, eso serß suficiente para las aplicaciones que se buscan╗.
Los chips CMOS de 65 nan¾metros se adaptan a los dos tipos de aprendizaje apropiados para un robot. El sistema puede programarse para seguir algoritmos basados en modelos, y puede aprender de su entorno utilizando un sistema de fortalecimiento que fomenta un mejor y mejor desempe±o a lo largo del tiempo, como un ni±o que aprende a caminar tropezando con cosas.
½Se inicia el sistema con un conjunto predeterminado de ōpesosö en la red neuronal para que el robot pueda comenzar desde un buen lugar y no se bloquee de inmediato ni proporcione informaci¾n err¾nea╗, dijo Raychowdhury. ½Cuando usted lo ubica en un nuevo sitio, el entorno tendrß algunas estructuras que reconocerß y otras que el sistema tendrß que aprender. Luego, el sistema tomarß las decisiones por su cuenta y evaluarß la efectividad de cada decisi¾n para optimizar sus movimientos╗.
La comunicaci¾n entre los robots les permite colaborar para buscar un objetivo.
½En un entorno de colaboraci¾n, el robot no solo necesita entender lo que estß haciendo, sino tambiķn lo que estßn haciendo los demßs en el mismo grupo╗, dijo. ½Trabajarßn para maximizar logros totales del grupo en lugar de una recompensa individual╗.
Con su demostraci¾n en la Conferencia Internacional de Circuitos de Estado S¾lido, que les aport¾ una prueba del dise±o, el equipo contin·a optimizando el desarrollo y estß trabajando en un sistema en chip para integrar los circuitos de computaci¾n y control.
½Queremos habilitar mßs y mßs funcionalidad en estos peque±os robots╗, agreg¾ Raychowdhury. ½Hemos demostrado lo que es posible, y lo que hemos hecho ahora tendrß que ser aumentado por otras innovaciones╗.
Fuente: Instituto de TecnologĒa de Georgia
ArtĒculos Relacionados:
• Walbi, el bĒpedo que aprende a caminar
• Usando electricidad y agua, un nuevo tipo de motor puede poner microrobots en movimiento
• Un robot que procura moverse tan bien como una hormiga
• LSM6DSOX: aceler¾metro y giroscopio con aprendizaje automßtico incorporado
• Logran que los robots rastreen objetos en movimiento con una precisi¾n sin precedentes
• Nuevos micro robots de tama±o celular podrĒan hacer viajes increĒbles
Pingback: Un chip de I.A. supera a los robots y drones mßs impresionantes | Robots Didßcticos