Un equipo de científicos de la Universidad Nacional de Singapur (NUS) se inspiró en los invertebrados submarinos como las medusas para crear una piel electrónica con una funcionalidad similar.
Al igual que una medusa, la piel electrónica es transparente, estirable, sensible al tacto y se auto-repara en entornos acuáticos. Pero además es conductora de la electricidad, y podría usarse en todo, desde pantallas táctiles resistentes al agua hasta robots acuáticos blandos.
El profesor asistente Benjamin Tee y su equipo del Departamento de Ciencia e Ingeniería de Materiales de la Facultad de Ingeniería de la Universidad Nacional de Singapur desarrollaron el material, junto con colaboradores de la Universidad de Tsinghua y la Universidad de California en Riverside.
El equipo de ocho investigadores dedicó poco más de un año a desarrollar el material, y su invención se publicó por primera vez este año en la revista Nature Electronics.
Materiales auto-reparables, transparentes e impermeables para un amplio rango de usos
El profesor asistente Tee ha estado trabajando en pieles electrónicas durante muchos años, y fue parte del equipo que desarrolló los primeros sensores electrónicos de piel con auto-reparación en 2012.
Su experiencia en esta área de investigación lo llevó a identificar los obstáculos clave que aún no han superado las pieles electrónicas auto-reparables. «Uno de los desafíos con la mayoría de los materiales auto-reparables actuales es que no son transparentes y no funcionan de manera eficiente cuando están mojados», dijo. «Estos inconvenientes los hacen menos útiles para aplicaciones electrónicas, como las pantallas táctiles, que a menudo deben usarse en condiciones de clima con humedad extrema».
![]()
Continuó: «Con esta idea en mente, comenzamos a observar a las medusas; son transparentes y capaces de percibir en el ambiente acuático. Entonces, nos preguntamos cómo podríamos hacer un material artificial que pudiera imitar la naturaleza resistente al agua de las medusas y, sin embargo, fuese sensible al tacto».
Tuvieron éxito en este esfuerzo al crear un gel que consiste en un polímero a base de fluorocarbono con un líquido ionizado rico en flúor. Cuando se los combina, la red de polímeros interactúa con el líquido iónico a través de interacciones ión-dipolo altamente reversibles, lo que le permite auto-repararse.
Al elaborar las ventajas de esta configuración, el profesor Tee explicó: «La mayoría de los geles de polímeros conductores, como los hidrogeles, se hinchan al sumergirlos en agua o se secan con el tiempo en el aire, lo que hace que nuestro material sea diferente es que puede conservar su forma tanto en entornos húmedos como secos. Funciona bien en agua de mar e incluso en ambientes ácidos o alcalinos».
La próxima generación de robots blandos
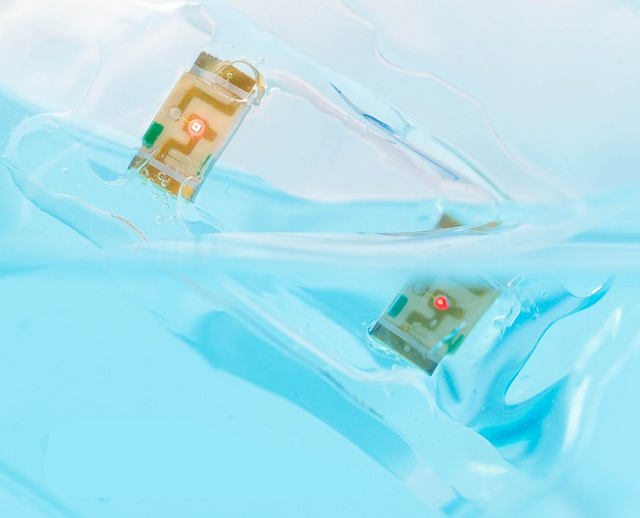
La piel electrónica se crea imprimiendo el material nuevo dentro de circuitos electrónicos. Como es un material blando y estirable, sus propiedades eléctricas cambian cuando se toca, presiona o se tensa.
«Luego podemos medir este cambio y convertirlo en señales eléctricas legibles para crear una amplia gama de diferentes aplicaciones de sensores», agregó el profesor Tee.
«La capacidad de imprimir nuestro material en 3D también muestra potencial en la creación de tableros de circuitos totalmente transparentes que podrían usarse en aplicaciones robóticas. Esperamos que este material pueda usarse para desarrollar varias aplicaciones en tipos emergentes de robots blandos», agregó el profesor Tee, quien también pertenece al Departamento de Ingeniería Eléctrica e Informática de NUS, y el Instituto Biomédico para la Investigación y Tecnología de Salud Global (BIGHEART) en NUS.
Los robots blandos, y la electrónica blanda en general, buscan imitar los tejidos biológicos para hacerlos más compatibles mecánicamente con las interacciones hombre-máquina. Además de las aplicaciones de robots blandos convencionales, la tecnología impermeable de este nuevo material permite el diseño de robots anfibios y dispositivos electrónicos resistentes al agua.
Una ventaja adicional de esta piel electrónica autorreparable es el potencial que tiene para reducir la basura tecnológica. Tee explicó: «Cada año, se generan globalmente millones de toneladas de desechos electrónicos provenientes de teléfonos móviles, tabletas, etc. Esperamos crear un futuro en el que los dispositivos electrónicos hechos de materiales inteligentes puedan realizar acciones de reparación automática para reducir la cantidad de desechos electrónicos en el mundo».
Próximos pasos
El profesor Tee y su equipo continuarán su investigación y esperan explorar más posibilidades de este material en el futuro. Dijo: «Actualmente, estamos haciendo uso de las propiedades integrales del material para hacer nuevos dispositivos optoelectrónicos, que podrían utilizarse en muchas nuevas interfaces de comunicación hombre-máquina».
Fuente de la historia: ScienceDaily. Materiales proporcionados por la Universidad Nacional de Singapur. Referencia de la publicación: Yue Cao, Yu Jun Tan, Si Li, Wang Wei Lee, Hongchen Guo, Yongqing Cai, Chao Wang, Benjamin C.-K. Tee. Pieles electrónicas autocurables para ambientes acuáticos. Nature Electronics, 2019; 2 (2): 75 DOI: 10.1038 / s41928-019-0206-5
Artículos relacionados:
■ Dando sentido del tacto a los robots
■ Nuevos micro robots de tamaño celular podrían hacer viajes increíbles
■ Una prótesis que restaura la sensación de dónde está tu mano
■ Módulo de teclado sensible al tacto TTP229
■ Un pequeño robot blando con muchas patas administraría fármacos al cuerpo humano
■ Usando electricidad y agua, un nuevo tipo de motor puede poner microrobots en movimiento
■ FlexShapeGripper: el agarre de la lengua de un camaleón