En esta página relataremos nuestras actividades en el desarrollo de robots. Por el momento, estamos ocupados comprando material usado de electrónica en remates. Los primeros proyectos son:
- 1. un robot de tres ruedas
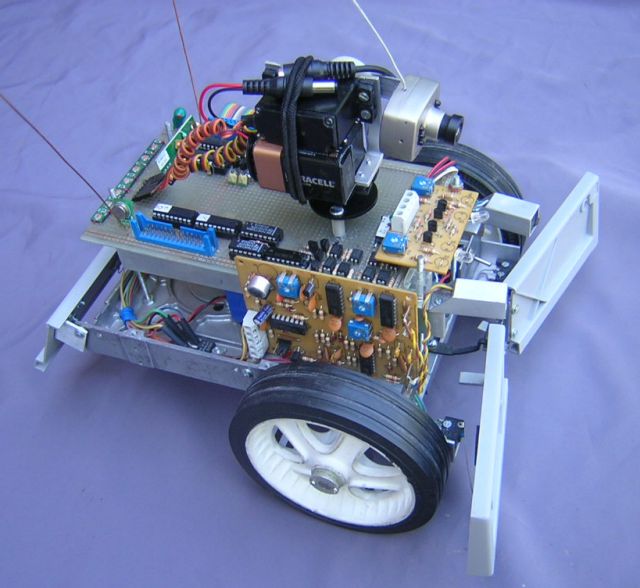
Un pequeño adelanto de lo que ya está armado...


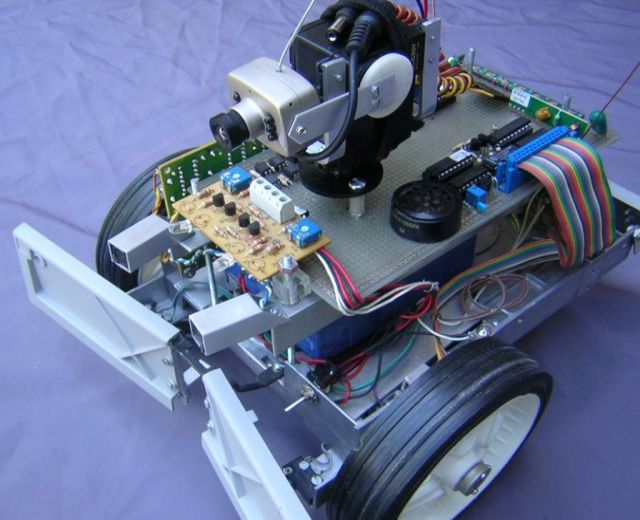
Segundo adelanto del robot casi terminado...




Así quedó
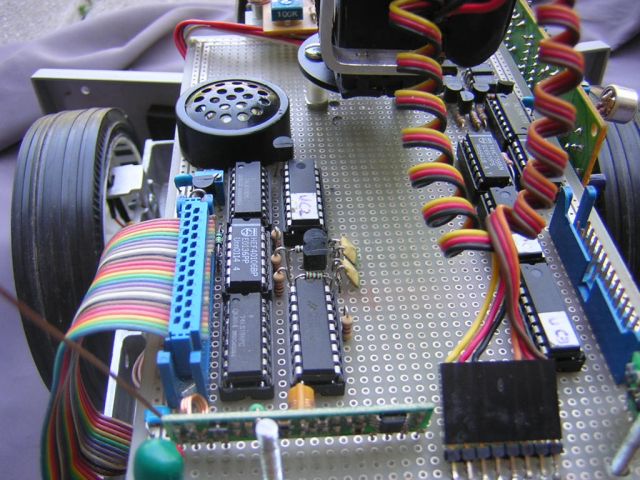
Detalles del armado
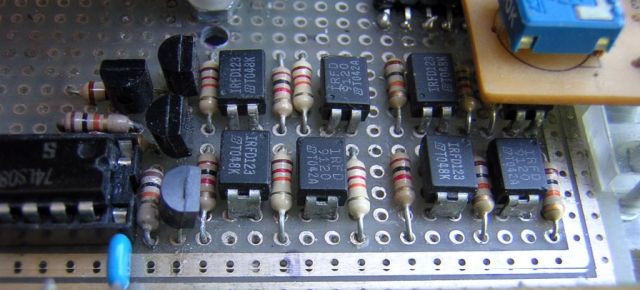
El puente H, alma del control de los motores
- 2. un robot con seis patas.
- 3. una cabeza animatrónica.
- 4. pruebas de laboratorio de sensores: CMU cam, presión, torsión, humedad, inclinación, movimiento, brújula, ultrasonidos, temperatura.
- 5. una mesa XYZ para CNC de tamaño pequeño.
- 6. un medidor de distancia ultrasónico.
- 7. un medidor de distancia infrarrojo.
- 8. una plaqueta de interfaz paralelo con una PC.
- 9. una plaqueta de control de motores por pasos.
- 10. una plaqueta de control de 8 servos.





