|
pasión por la robótica en Argentina |
|
[PRINCIPAL] [ROBOTS DIDACTICOS] [NOSOTROS] [ACTIVIDAD] [NOTICIAS] [ARTICULOS] [GALERIA] [ENLACES] [CONTACTO] |
Actuadores - Manos
|
 |
Además de la cantidad de articulaciones que se necesitan para darle versatilidad a una mano robótica, se necesita sensibilidad táctil.
Para que podamos mover las falanges como lo hacemos, los dedos de la mano humana poseen 3 articulaciones cada uno —15 en total en toda la mano—. A éstas hay que agregarles la articulación principal de la muñeca.
De ellas, seis son juntas de doble eje de movimiento o "universales". Traducido a actuadores, o motores, para hablar en términos sencillos, esto significa que para mover una mano de manera diestra deben actuar orquestadamente 21 de estos actuadores, todos ellos ubicados en un espacio bastante acotado.
Y cuando descubrimos que hacen falta sensores de tacto como los que tenemos nosotros en las manos, veremos que, como mínimo, se necesitan unas dos decenas de ellos.
Recordemos que además hacen falta sensores de temperatura, o nuestra mano robótica correrá graves riesgos de resultar dañada.
Obsérvese en la imagen de abajo los diversos sensores de presión (áreas de color negro), de distintas formas, que se utilizan en esta mano experimental.
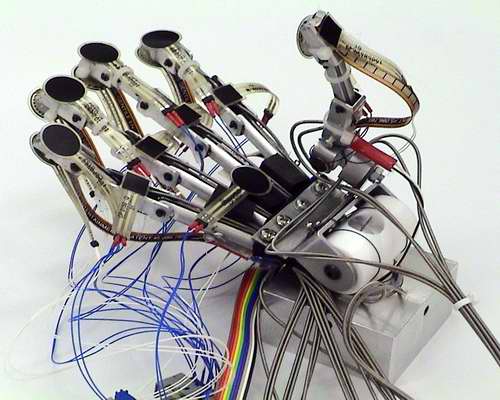
Obsérvense los sensores en la punta y parte media de los dedos, y en la "palma"
La mano humana y sus movimientos
 Articulaciones del dedo |
Los dedos también tienen dos grados de libertad en su articulación con la palma (llamada metacarpofalangeal en nuestra anatomía, ya que articula la falange proximal con el hueso metacarpiano). Uno de los movimientos (el lateral, que nos permite abrir los dedos) es muy limitado, pero el otro (llamado de flexión) es extremadamente amplio.
El pulgar tiene una movilidad excepcional —por esto es absolutamente clave en las habilidades de manipulación—, y los otros cuatro dedos se mueven de manera limitada en sentido lateral, aunque su capacidad de flexión (para abrir y cerrar la mano) es muy buena. Esta capacidad de flexionar así los dedos es, claro, muy importante para la habilidad que tenemos de atrapar objetos y mantenerlos con seguridad.
 Movimientos de una mano |
En la mano humana este movimiento es limitado, con una cierta interconexión entre los dedos, lo que los hace moverse más o menos juntos. Sin embargo, con un esfuerzo de voluntad es posible moverlos por separado, unos milímetros a cada lado. Esta movilidad es muy importante en el ajuste de la cavidad de agarre de la mano, que así puede atrapar objetos mayores al tener los dedos abiertos.
 Dedos robóticos |
Las manos robóticas requieren un especial trabajo de diseño en esta parte de su capacidad de operación: la flexión de todos los dedos y la movilidad del pulgar. Las soluciones no son fáciles y, por lo general, requieren de sistemas especiales de engranajes, o actuadores poco comunes, muy miniaturizados, y diversos tipos de implementaciones para los tendones artificiales. De hecho, aún está en discusión cuál sería la forma más eficiente de implementar las soluciones, como se puede observar en las discusiones que se presentan dentro de los ejemplos que ofrecemos más adelante.
Si bien hay manos robóticas que emulan estrechamente la anatomía de nuestras manos, es común ver otras soluciones. Una de las cosas notables de la mano humana es que el dedo meñique no tiene una gran utilidad para la manipulación; se puede decir que es casi innecesario. Por esta razón las manos robóticas suelen obviarlo, y se construyen con tres dedos manipuladores más el pulgar. También hay manos robóticas con sólo tres dedos en total, aunque compensan esto con algunas capacidades de movilidad fuera de lo común.
{kind=link}
{kind=link}
Algunos ejemplos de manos robóticas
 |
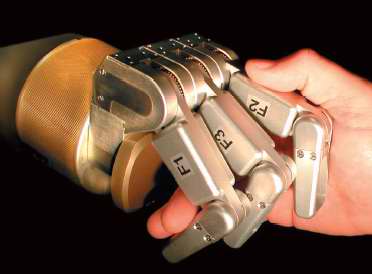
Presentamos también la "Shadow Dextrous Hand" (que se ve en la imagen arriba de todo a la derecha, comparada con una mano humana), producida por Shadow Robot Company. Esta mano robótica, que se vende en el mercado comercial, opera con unos raros actuadores llamados "músculos de aire" (air muscles).
La mano NAIST: conceptos aplicados
La mano NAIST tiene 4 dedos, que en conjunto suman 12 grados de libertad de movimiento (movimientos posibles). Cada dedo tiene 3 grados de libertad; dos de ellos en la articulación del dedo con la palma y uno en la falange media del dedo (la falange del extremo del dedo o "yema" se mueve en conjunto con la falange media). Todos los actuadores están incluidos en la palma. Las articulaciones se mueven gracias a engranajes especialmente diseñados, que no utilizan alambres como tendones.
La forma em que se ha solucionado el mecanismo reduce las restricciones de espacio para colocar los actuadores y proporciona un buen acceso para el mantenimiento.
Módulo de un dedo
El módulo tiene 3 articulaciones (llamadas MP, PIP and DIP). La articulación MP tiene dos grados de libertad, que son los que corresponden a los movimientos de aducción/abducción y flexión/extensión. La articulación PIP tiene 1 grado de libertad, con movimiento de flexión/extensión.
El movimiento de flexión/extensión de la articulación DIP está acoplado con el movimiento de la articulación PIP. Esta construcción se basa en el conocimiento de la fisiología de las articulaciones PIP y DIP en los humanos, que se mueven sincronizadas. Como resultado de todo esto, cada dedo posee 3 grados de libertad de movimientos independientes.

Mecanismo de engranajes
Generalmente, debido a que la articulación MP tiene 2 grados de libertad, es difícil mover la articulación de la falange PIP con un mecanismo ubicado en la palma de la mano, enlazado mecánicamente de algún modo.
Por lo tanto, en los mecanismos convencionales de mano robótica los motores para las articulaciones PIP/DIP se incluyen en la propia articulación del dedo.
Esto impone una gran restricción de tamaño, por lo que no se pueden utilizar motores con suficiente fuerza.
Esto era una dificultad que se debía superar para lograr suficiente fuerza en la yema del dedo, aunque la fuerza de torsión común en la articulación MP fuese suficiente.
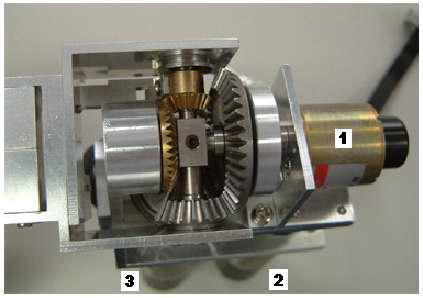 Caja de engranajes y motores |
En el concepto de diseño de la mano NAIST, los 3 actuadores están dentro de la palma; el motor 1 es para aducción/abducción de la articulación MP (movimiento lateral del dedo en la palma), el 2 para flexión/extensión de MP (flexión del dedo completo), y el 3 para flexión/extensión de PIP (flexión de las falanges media y la del extremo del dedo; son los engranajes dorados).
Como se observa en la foto, en la articulación MP se conjugan dos juegos diferentes de movimiento, producidos por tres engranajes cónicos. El eje de salida del motor 3 pasa a través del engranaje y de la polea que están unidas al motor 2.
La mejor manera de comprender los movimientos de esta caja de engranajes es ver el vídeo ubicado en la página original de los diseñadores de esta mano (está en formato MPG y tiene una extensión de 9,6 Mb).
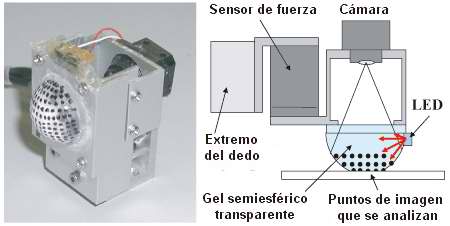
Sensor táctil de la punta de los dedos
Lo más interesante de este diseño, por lo poco común, es el sensor que se utiliza para obtener una realimentación táctil de la presión de los dedos sobre un objeto que se toma con la mano robótica. El sensor consiste de una semiesfera transparente de gel, una pequeña cámara de vídeo y un sensor de fuerza que se utiliza para implementar la estimación directa del deslizamiento.
Este control de la fuerza de sujección tiene las siguientes ventajas:
- El senseo, que se realiza por medio de un análisis de la imagen del área de contacto, es muy preciso.
- Se estima directamente el valor de deslizamiento sin conocer el coeficiente de fricción.
- La fuerza de agarre es estable gracias a una realimentación directa del valor de deslizamiento. Estimando el valor de deslizamiento en el momento en que éste comienza, se puede estimar una fuerza estable de sujección.
La mano robótica Shadow Dextrous
 |
Se trata de un sistema completo, autocontenido. La sección del antebrazo contiene los músculos y las válvulas que los manejan. El sistema incorpora los controles necesarios para el control de la mano, entre ellos programas de computadora bajo la licencia GNU GPL.
Las dimensiones y proporciones de esta mano son las de un varón humano típico. La estructura del antebrazo es comparable en longitud al antebrazo humano, aunque en la base se ensancha hasta 146 mm.
Algunas medidas más:
- Longitud de un dedo desde la yema del dedo al centro del nudillo: 100 mm.
- Longitud del pulgar: 102 mm.
- Longitud de la palma desde el nudillo medio al eje de movimiento de la muñeca: 99 mm.
- Grosor de la palma: 22 mm.
- Ancho de la palma: 84 mm.
- Ancho del pulgar en la base: 34 mm.
- Desde la base del antebrazo al eje de movimiento de la muñeca: 434 mm.
La mano, sensores, músculos y las válvulas de control tienen un peso total de 3,8 kilogramos. El centro de masa está a aproximadamente 160 mm de la base.
Existe cierta variedad en velocidades de movimiento entre las piezas de la mano. Los diversos métodos de movimiento producen variación en las velocidades máximas. El movimiento general es, en promedio, de algo más de la mitad de la velocidad de la de un ser humano. Por ejemplo, el tiempo de transición desde abierto a cerrado de la mano completa es de 0,2 segundos, aproximadamente.
Sensores de posición
La rotación de las articulaciones se mide con sensores de efecto Hall que tienen una resolución típica de 0,2 grados. Estos datos se digitalizan localmente con convertidores analógico / digitales de 12 bits. La velocidad de muestreo se puede configurar hasta llegar a un máximo de 180 Hz.
Sensores de presión
La presión en cada músculo se mide con sensores de presión de estado sólido colocados directamente en las válvulas. Se mide con una resolución de 12 bits en un rango de 0 a 4 bars.
Músculos de aire
Los músculos de aire (Air Muscles) o, mejor, músculos neumáticos, se comportan de una manera muy similar a un músculo biológico. Cuando se les insufla aire comprimido, se contraen hasta alcanzar un 40 % de su longitud original. A medida que se van contrayendo, la fuerza que ejercen se reduce, pero la primera parte del recorrido es suficientemente potente. Por esa razón, por lo general se los utiliza ampliando el movimiento por medio de una palanca.
 |
MÁS DATOS
Artículo original sobre la mano NAIST
Artículo en PDF con datos más amplios sobre la mano NAIST
Página principal del fabricante Shadow con datos más amplios sobre la mano Shadow Dextrous
Hoja de datos técnicos de la mano Shadow Dextrous
|
|