
Un motor paso a paso es un dispositivo electromecßnico que convierte pulsos elķctricos en movimientos mecßnicos exactos. El eje de un motor paso a paso gira en pasos de ßngulos fijos cuando se le aplican impulsos elķctricos en la secuencia correcta. La direcci¾n de rotaci¾n del eje del motor se relaciona directamente con la secuencia de los pulsos. La velocidad de la rotaci¾n del eje estß relacionada con la frecuencia de los pulsos de entrada y la duraci¾n de la rotaci¾n estß relacionada con la cantidad de pulsos que se aplican a la entrada.

Una de las ventajas mßs importantes de un motor paso a paso es su capacidad de ser controlado con precisi¾n en un sistema de lazo abierto, es decir, sin necesidad de ninguna realimentaci¾n que indique su posici¾n. Este tipo de control elimina la necesidad de costosos dispositivos de detecci¾n y ajuste, como los codificadores ¾pticos.
Para ampliar su conocimiento en mßs detalle sobre motores paso a paso ver aquĒ.
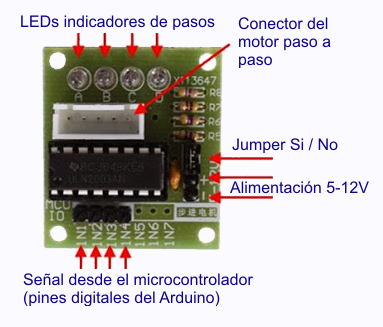
28BYJ-48 y su m¾dulo controlador asociado ULN2003
El motor 28BYJ-48 tiene un ßngulo de paso de 5,625 grados (64 pasos por vuelta usando half-step). El reductor interno tiene una relaci¾n de 1/64. Combinados, la precisi¾n total es 64 x 64 = 4096 pasos por vuelta, equivalente a un paso de 0,088░, que resulta en una precisi¾n muy elevada. Debido a alguna raz¾n mecßnica que el fabricante no explica, no son exactamente 4096: es necesario aclarar que la cantidad verdadera de pasos para dar una vuelta completa de 360░ Ścomo verßn en el programaŚ es de 4076.
Los parßmetros de este motor paso a paso son:
- Modelo: 28BYJ-48 ¢ 5V
- Tensi¾n nominal: 5V (o 12 V, valor indicado en la parte trasera).
- Cantidad de fases: 4.
- Reductor de velocidad: 1/64
- ┴ngulo de paso: 5,625░ / 64
- Frecuencia: 100Hz
- Resistencia en CC: 50O ▒7 % (25░ C)
- Frecuencia con tracci¾n: > 600Hz
- Frecuencia sin tracci¾n: > 1000Hz
- Torque con tracci¾n: >34,3mN.m (120Hz)
- Torque en autoposicionamiento: >34,3mN.m
- Torque con fricci¾n: 600-1200 gf.cm
- Arrastre en torque: 300 gf.cm
- Resistencia de aislaci¾n > 10MO (500V)
- Aislaci¾n elķctrica: 600VAC/1mA/1s
- Grado de aislaci¾n: A
- Aumento de temperatura: < 40K (120Hz)
- Ruido: < 35dB (120Hz, sin carga, 10cm)
El integrado ULN2003
Consiste en un conjunto de 7 pares de transistores en configuraci¾n Darlington, con diodo de protecci¾n de contracorriente. Cada salida es capaz de manejar 500 mA y hasta 50V en sus salidas.
Diagrama en bloques:
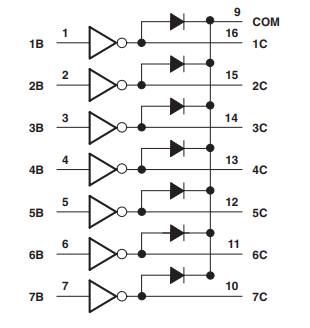
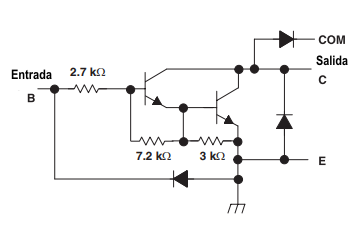
Diagrama interno de cada circuito:
Los circuitos de transistores Darlington tienen un resistor en la entrada, de modo que se los puede conectar directamente a la salida de un microcontrolador. Tambiķn tienen protecci¾n con un diodo para evitar da±os en las entradas, si accidentalmente se les aplica un voltaje negativo.
┐C¾mo se acciona?
El motor tiene cuatro bobinados que son excitados en una precisa secuencia para hacer girar el eje.
En el modo elegido, de medio paso, o ōhalf stepö, primero se excita una bobina, luego dos a la vez, luego la siguiente… Y asĒ hasta completar la secuencia. Para cambiar el sentido de giro, simplemente se invierte el orden de la secuencia.
Diagrama de las dos secuencias usadas habitualmente
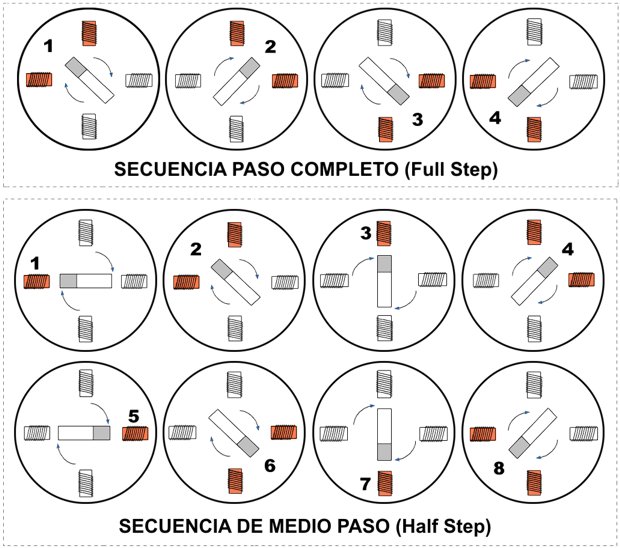
Por eso, en la secuencia de medio paso (half step, en inglķs), la variaci¾n de se±ales necesaria para el funcionamiento en uno u otro sentido tiene 8 combinaciones, tal como lo muestra el cuadro.
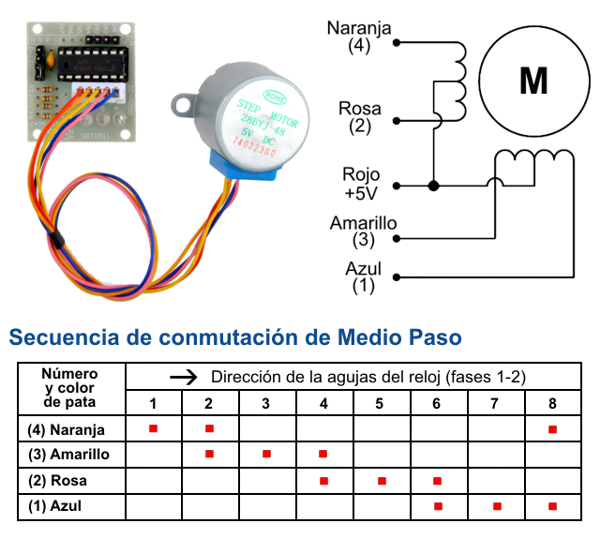
Vista del conector al motor y las salidas A, B, C, D y E (entrada de alimentaci¾n):
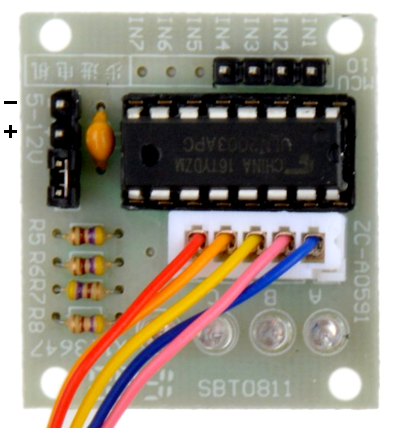
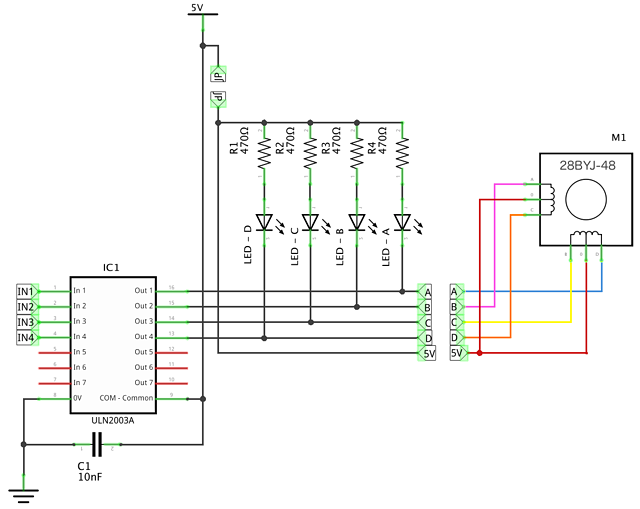
Diagrama de la placa de control:
A (Azul), B (Rosa), C (Amarillo), D (Naranja), E (Rojo)
La conexi¾n entre el m¾dulo y el motor no requiere mucha atenci¾n ya que tiene un conector con ranuras para guiar la uni¾n entre los dos dispositivos.
El m¾dulo posee cuatro leds que indican quķ bobina estß activada (dibujo de arriba) en cada momento.
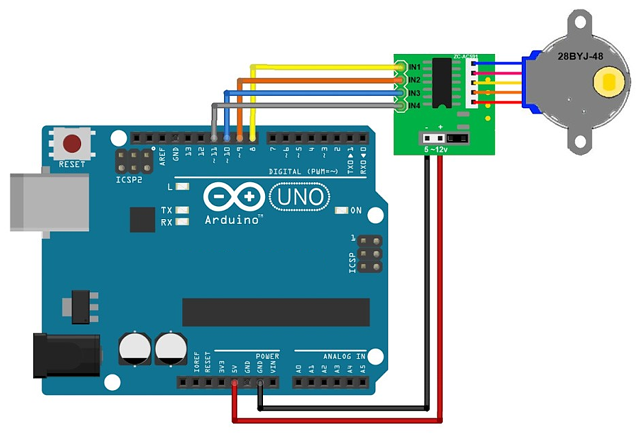
La salida de 5V de la placa Arduino es suficiente para un motor, pero si su proyecto tiene mßs elementos conectados, debe usar una fuente de alimentaci¾n externa de 5V, debido a que se puede exceder la corriente que es capaz de suministrar el microcontrolador.
Los pines IN1, IN2, IN3 e IN4 se conectan a cuatro salidas digitales del Arduino (pines digitales del 8 al 11 empezando, por el IN1 con el 8).
Programa
El programa tal como se ve estß preparado para el modo de medio paso, o half-step, ya que es el que recomienda el fabricante. Sin embargo, cambiando los signos // de comentario en el programa de un bloque de c¾digo a otro, es posible probar los tres modos en el motor.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 |
//definicion de pines const int pinMotor1 = 8; // 28BYJ48 - In1 const int pinMotor2 = 9; // 28BYJ48 - In2 const int pinMotor3 = 10; // 28BYJ48 - In3 const int pinMotor4 = 11; // 28BYJ48 - In4 //definicion variables int velocidadMotor = 1000; // variable para determinar la velocidad // 800 maxima - minima 1000 o mas int contadorPasos = 0; // contador para los pasos int pasosPorVuelta = 4076; // pasos para una vuelta completa // Tablas con la secuencia de encendido // quitar signo de comentar a la necesaria) //secuencia 1-fase usar velocidadMotor = 2000 //const int cantidadPasos = 4; //const int tablaPasos[4] = { B1000, B0100, B0010, B0001 }; //secuencia 2-fases usar velocidadMotor = 2000 //const int cantidadPasos = 4; //const int tablaPasos[4] = { B1001, B1100, B0110, B0011 }; //secuencia media fase usar velocidadMotor = 1000 const int cantidadPasos = 8; const int tablaPasos[8] = { B1000, B1100, B0100, B0110, B0010, B0011, B0001, B1001 }; void setup() { //declarar pines como salida pinMode(pinMotor1, OUTPUT); pinMode(pinMotor2, OUTPUT); pinMode(pinMotor3, OUTPUT); pinMode(pinMotor4, OUTPUT); } void loop() { for (int i = 0; i < pasosPorVuelta * 2; i++) { sentidoHorario(); delayMicroseconds(velocidadMotor); } delay(200); for (int i = 0; i < pasosPorVuelta * 2; i++) { sentidoAntihorario(); delayMicroseconds(velocidadMotor); } delay(200); } void sentidoHorario() // en direcci¾n de las agujas del reloj { contadorPasos++; if (contadorPasos >= cantidadPasos) contadorPasos = 0; escribirSalidas(contadorPasos); } void sentidoAntihorario()// en direcci¾n contraria a las agujas del reloj { contadorPasos--; if (contadorPasos < 0) contadorPasos = cantidadPasos - 1; escribirSalidas(contadorPasos); } void escribirSalidas(int paso) { digitalWrite(pinMotor1, bitRead(tablaPasos[paso], 0)); digitalWrite(pinMotor2, bitRead(tablaPasos[paso], 1)); digitalWrite(pinMotor3, bitRead(tablaPasos[paso], 2)); digitalWrite(pinMotor4, bitRead(tablaPasos[paso], 3)); } |
Este programa hace girar al motor dos vueltas completas en un sentido, y luego dos vueltas en el otro sentido. Es posible cambiar algunos parßmetros para ver su funcionamiento en tres modos diferentes.
Presento aquĒ un interesante dise±o realizado con cuatro de estos motores como tracci¾n y cuatro servos para darles direcci¾n. Su creador lo ha llamado Stepperbot. He aquĒ una foto del proyecto (al que, sin duda, habrĒa que quitarle una buena cantidad de peso acortando los cables al mĒnimo). Con menor peso podĒa moverse mßs rßpido, utilizando ruedas de mayor dißmetro.
Lo interesante es la gran flexibilidad de movimientos que ha logrado. Agrego un video para mostrar su desplazamiento.