
Ingenieros y científicos han desarrollado un prototipo de robot que puede llegar a algunos de los conductos bronquiales más estrechos de los pulmones para tomar muestras de tejido o administrar terapia contra el cáncer.
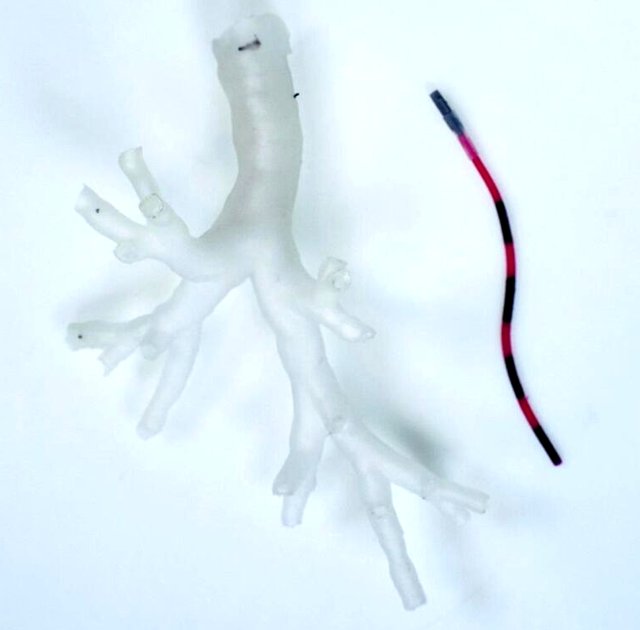
Este tentáculo robótico magnético mide solo 2 milímetros de diámetro. Se utilizarán imanes en el exterior del paciente para guiar el robot a su lugar.
El dispositivo ha sido desarrollado por un equipo de ingenieros, científicos y médicos con sede en el Laboratorio STORM de la Universidad de Leeds, que es pionero en el uso de sistemas robóticos para ayudar en los procedimientos de endoscopia y catéter, en los que se inserta un tubo fino en el cuerpo.
Los investigadores han publicado su desarrollo en la revista Soft Robotics.
La prueba del prototipo se basó en pruebas de laboratorio en la que se utilizó una réplica tridimensional de un árbol bronquial, modelado a partir de datos anatómicos. La próxima fase de la investigación investigará la efectividad del dispositivo para navegar por los pulmones de un cadáver.
Límites de la tecnología existente
Actualmente, los médicos utilizan un instrumento llamado broncoscopio para realizar un examen de los pulmones y las vías respiratorias. El procedimiento consiste en pasar un instrumento basado en un tubo flexible de unos 3,5 a 4 milímetros de diámetro a través de la nariz o la boca hasta los conductos bronquiales. Debido a su tamaño, este broncoscopio solo puede llegar hasta los niveles superiores del árbol bronquial.
Para profundizar en los pulmones, se pasa un catéter o tubo fino —que mide unos 2 milímetros de diámetro— a través del broncoscopio y luego hacia los conductos más estrechos de los pulmones. Pero los médicos tienen limitaciones para operar un broncoscopio con este método, y es difícil lograr la movilidad del instrumento y el catéter hasta donde son necesarios.
Clic en la imagen para ver video
El tentáculo robótico magnético, en cambio, fue desarrollado para ser mucho más maniobrable y utiliza un sistema de guía personalizado para cada procedimiento.
El profesor Pietro Valdastri, director del laboratorio STORM que supervisó la investigación, dijo: “Un robot o catéter tentáculo magnético que mide 2 milímetros y cuya forma se puede controlar con campos magnéticos para adaptarse a la anatomía del árbol bronquial puede llegar a la mayoría de las áreas del pulmón, y sería una herramienta clínica importante en la investigación y el tratamiento de un posible cáncer de pulmón y otras enfermedades pulmonares.
“Nuestro sistema utiliza un sistema de guía magnético autónomo que elimina la necesidad de que los pacientes estén bajo rayos X mientras se realiza el procedimiento”.
Tecnología innovadora
Para desarrollar el sistema robótico, el equipo de investigación tuvo que superar dos grandes desafíos. En primer lugar, tenían que hacer un dispositivo que fuera pequeño, flexible y capaz de navegar por las curvas y torsiones de la anatomía del árbol bronquial.
En segundo lugar, necesitaban un sistema autónomo para guiar hasta su lugar el tentáculo robótico magnético, eliminando la necesidad de que un médico maniobre manualmente un instrumento para colocarlo en su lugar, lo que a menudo implica que el paciente esté expuesto a rayos X y puede ser un desafío técnico para el personal medico.
Robot pequeño y flexible
Para reducir el tamaño del robot manteniendo la capacidad de control del movimiento, los investigadores lo fabricaron a partir de una serie de segmentos cilíndricos interconectados, cada uno de 2 milímetros de diámetro y de poca longitud. Los segmentos fueron hechos de un material elastomérico blando similar al caucho, que impregnaron con pequeñas partículas magnéticas.
Debido a la presencia de partículas magnéticas, los segmentos interconectados pueden moverse con cierta independencia bajo el efecto de un campo magnético externo. El resultado es un tentáculo robótico magnético muy flexible, capaz de cambiar de forma y lo suficientemente pequeño como para evitar trabarse en las estructuras anatómicas de los pulmones.
Sistema de guiado
Se usarían imanes montados en brazos robóticos en el exterior del paciente para guiar el dispositivo hacia los pulmones en un proceso que se haría a la medida de cada procedimiento. La ruta a través del árbol bronquial se planifica a partir de exploraciones preoperatorias de los pulmones de un paciente y se programa en el sistema robótico. A medida que se mueven los imanes fuera del paciente, aplican fuerzas sobre las partículas magnéticas en los segmentos del catéter, lo que hace que cambien de forma o dirección. Esto permite maniobrar el robot a través de los pulmones y al sitio de una lesión sospechosa.
Una vez en la ubicación a la que se deseaba llegar, el robot se usa para tomar una muestra de tejido o administrar un tratamiento.
Puede pasar tiempo antes de que la tecnología de «tentáculos magnéticos» esté disponible en un entorno hospitalario. El laboratorio STORM de la Universidad de Leeds está revolucionando la tecnología utilizada en las investigaciones endoscópicas y de catéteres. Han creado un prototipo de endoscopio de bajo costo , utilizado para investigar el tracto gastrointestinal superior, que podría usarse en países de ingresos bajos a medios donde la falta de acceso a equipos costosos está obstaculizando los programas de detección. La tecnología magnética también es el núcleo de un sistema de colonoscopia robótica que es más fácil de operar para el personal y más cómodo para los pacientes.
El laboratorio STORM es parte del Centro de Investigación del Cáncer de Leeds, que se inauguró a principios de año.
________________________________________
Artículo original: University of Leeds, News Wise, www.newswise.com/articles/engineers-develop-a-magnetic-tentacle-robot-to-pass-into-the-narrow-tubes-of-the-lung
Artículos relacionados:








Artículos Relacionados: