Los robots sigue-líneas, o seguidores de línea, son robots con una única misión, que es seguir una línea marcada en el suelo normalmente de color negro sobre una base plana de color blanco, pero también puede ser programado para seguir una línea de color blanco sobre una base negra.
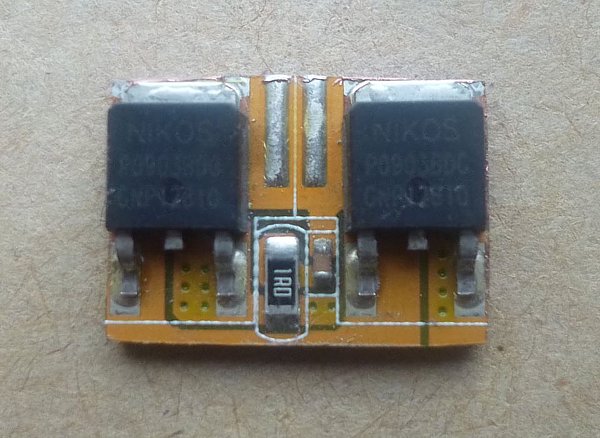
Aquí está el circuito que elegí para el robot sigue-líneas que es el siguiente proyecto didáctico, que se observa en una de las fotos más abajo. Debajo del diagrama los datos de los transistores de potencia que voy a utilizar, rescatados de una motherboard donada por el Plan RECOPAR en un acto en Tecnópolis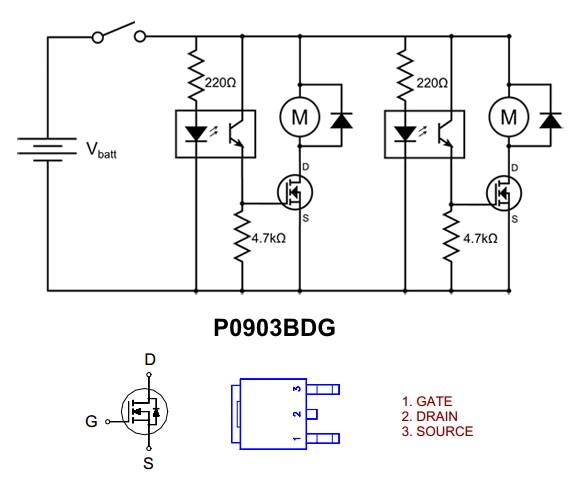 Los transistores de potencia (se observan en el circuito abajo del símbolo del motor, con la letra M y abajo del diagrama, con su nombre y en detalle) fueron rescatados de una placa base de PC (motherboard) que me donaron en un reciente evento en Tecnópolis (también agrego foto de estos transistores MOSFET en la placa, y luego recortados de ella). Los transistores son P093BDG, NMOS de canal N de potencia, para manejar los motores del robot
Los transistores de potencia (se observan en el circuito abajo del símbolo del motor, con la letra M y abajo del diagrama, con su nombre y en detalle) fueron rescatados de una placa base de PC (motherboard) que me donaron en un reciente evento en Tecnópolis (también agrego foto de estos transistores MOSFET en la placa, y luego recortados de ella). Los transistores son P093BDG, NMOS de canal N de potencia, para manejar los motores del robot
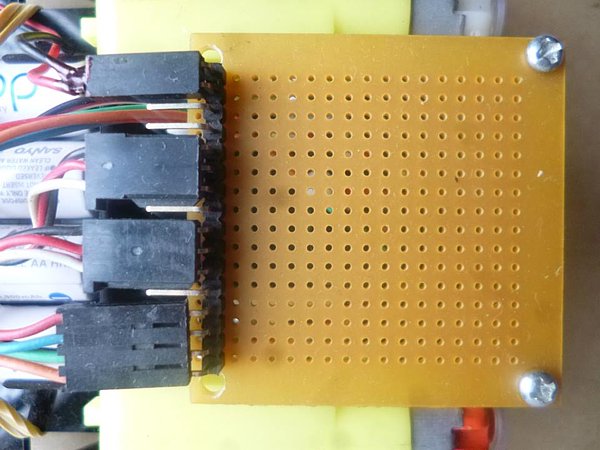
Los sensores de reflexión son CNY70, rescatados de una plaqueta que probablemente perteneciera a una máquina lectora de tarjetas, que encontré en la calle. Los motores y el portapilas forman parte de un chassis básico para robot que compré en China a través de e-Bay. El circuito lo armaré sobre una plaqueta de la mitad del tamańo de la que se ve en la foto. Este tamańo es para la segunda versión, un circuito basado en un microcontrolador programable (ver foto abajo)
Los motores y el portapilas forman parte de un chassis básico para robot que compré en China a través de e-Bay. El circuito lo armaré sobre una plaqueta de la mitad del tamańo de la que se ve en la foto. Este tamańo es para la segunda versión, un circuito basado en un microcontrolador programable (ver foto abajo)
 Vista de los sensores en la parte de abajo, y delantera, del robot, que van ubicados a poca distancia del suelo. (Como se puede observar, la estática ya le agregó a esta parte inferior bastante tierrita de Ituzaingó)
Vista de los sensores en la parte de abajo, y delantera, del robot, que van ubicados a poca distancia del suelo. (Como se puede observar, la estática ya le agregó a esta parte inferior bastante tierrita de Ituzaingó)
