
El integrado L293D incluye cuatro circuitos para manejar cargas de potencia media, en especial pequeńos motores y cargas inductivas, con la capacidad de controlar corriente hasta 600 mA en cada circuito y una tensión entre 4,5 V a 36 V.
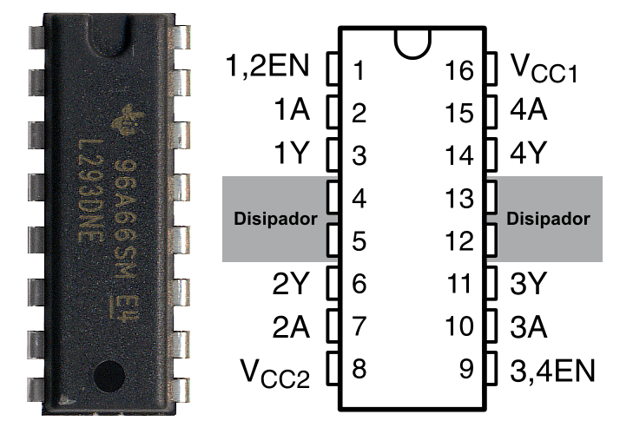
L293D
Los circuitos individuales se pueden usar de manera independiente para controlar cargas de todo tipo y, en el caso de ser motores, manejar un śnico sentido de giro. Pero ademįs, cualquiera de estos cuatro circuitos sirve para configurar la mitad de un puente H.
El integrado permite formar, entonces, dos puentes H completos, con los que se puede realizar el manejo de dos motores. En este caso el manejo serį bidireccional, con frenado rįpido y con posibilidad de implementar fįcilmente el control de velocidad.
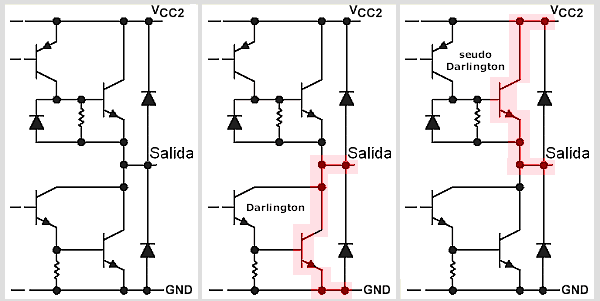
Diagrama detallado del circuito interno
Diagrama simplificado
Las salidas tienen un diseńo que permite el manejo directo de cargas inductivas tales como relés, solenoides, motores de corriente continua y motores por pasos, ya que incorpora internamente los diodos de protección de contracorriente para cargas inductivas.
Las entradas son compatibles con niveles de lógica TTL. Para lograr esto, incluso cuando se manejen motores de voltajes no compatibles con los niveles TTL, el chip tiene patas de alimentación separadas para la lógica (VCC1, que debe ser de 5V), y para la alimentación de la carga (VCC2, que puede ser entre 4,5V y 36V).
Las salidas poseen un circuito de manejo en configuración «totem-pole» (término en inglés que se traduce como «poste de tótem», nombre que, grįficamente, nos remite a un «apilamiento» de transistores, como las figuras en los famosos totems indķgenas).
En esta estructura, unos transistores en configuración Darlington conducen la pata de salida a tierra y otro par de transistores en conexión seudo Darlington aporta la corriente de alimentación desde VCC2. Las salidas tienen diodos incorporados en el interior del chip para proteger al circuito de manejo de potencia de las contracorrientes de una carga inductiva.
Estos circuitos de salida se pueden habilitar en pares por medio de una seńal TTL. Los circuitos de manejo de potencia 1 y 2 se habilitan con la seńal 1,2EN y los circuitos 3 y 4 con la seńal 3,4EN.
Las entradas de habilitación permiten controlar con facilidad el circuito, lo que facilita la regulación de velocidad de los motores por medio de una modulación de ancho de pulso. En ese caso, las seńales de habilitación en lugar de ser estįticas se controlarķan por medio de pulsos de ancho variable.
Las salidas actśan cuando su correspondiente seńal de habilitación estį en alto. En estas condiciones, las salidas estįn activas y su nivel varķa en relación con las entradas. Cuando la seńal de habilitación del par de circuitos de manejo estį en bajo, las salidas estįn desconectadas y en un estado de alta impedancia.

Conexionado para un motor con giro en ambos sentidos (lado izquierdo) y con motores con giro en sentido śnico en dos salidas (lado derecho)
Por medio de un control apropiado de las seńales de entrada y conectando el motor a sendas salidas de potencia, cada par de circuito de manejo de potencia conforma un puente H completo, como se ve en el diagrama de arriba, lado izquierdo. En la tabla de funcionamiento que sigue se puede observar los niveles TTL que corresponden a cada situación de trabajo:
Ejemplo de circuito en forma de puente H (para control bidireccional del motor) y su tabla de manejo
Disipador
Las patas centrales de la cįpsula del chip estįn pensadas para proveer el contacto térmico con un dispador que permitirį lograr la potencia mįxima en el manejo del integrado. En la figuras que siguen se observa la distribución de pines afectados a esta disipación, el įrea de cobre que se deja en el circuito impreso por debajo y a los lados del chip, y el diseńo del disipador que propone el fabricante. La hoja de datos aporta una curva que permite una variación de estos tamańos segśn la potencia a manejar.


Shield de Arduino
Esta plaqueta posee dos L293D, o sea que permite controlar 4 motores de CC o dos motores paso a paso. Tiene aparte otras salidas.
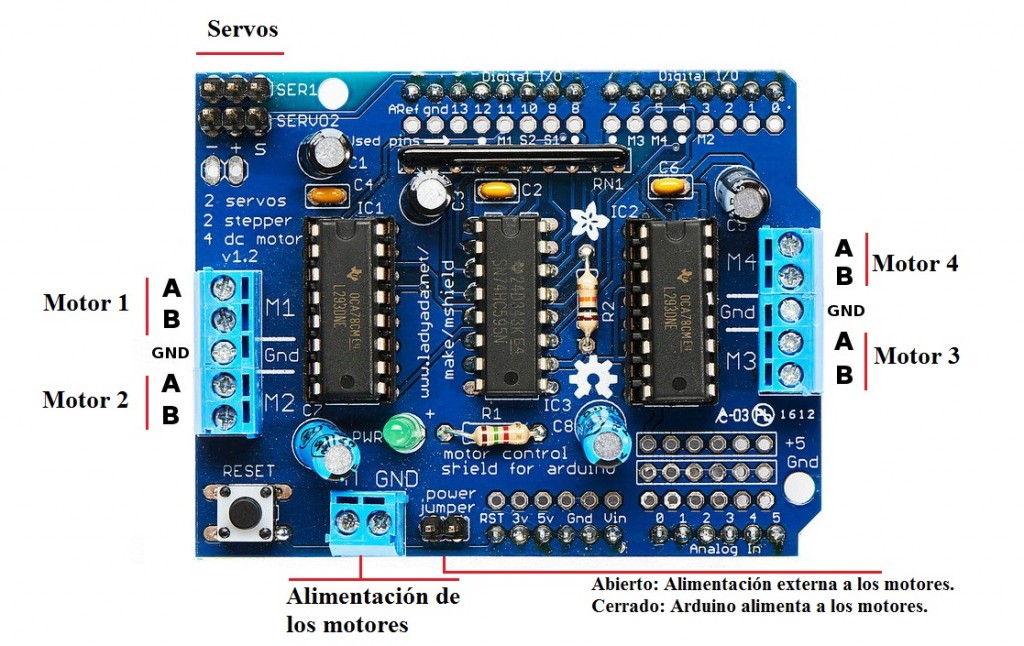
Diagrama de la placa
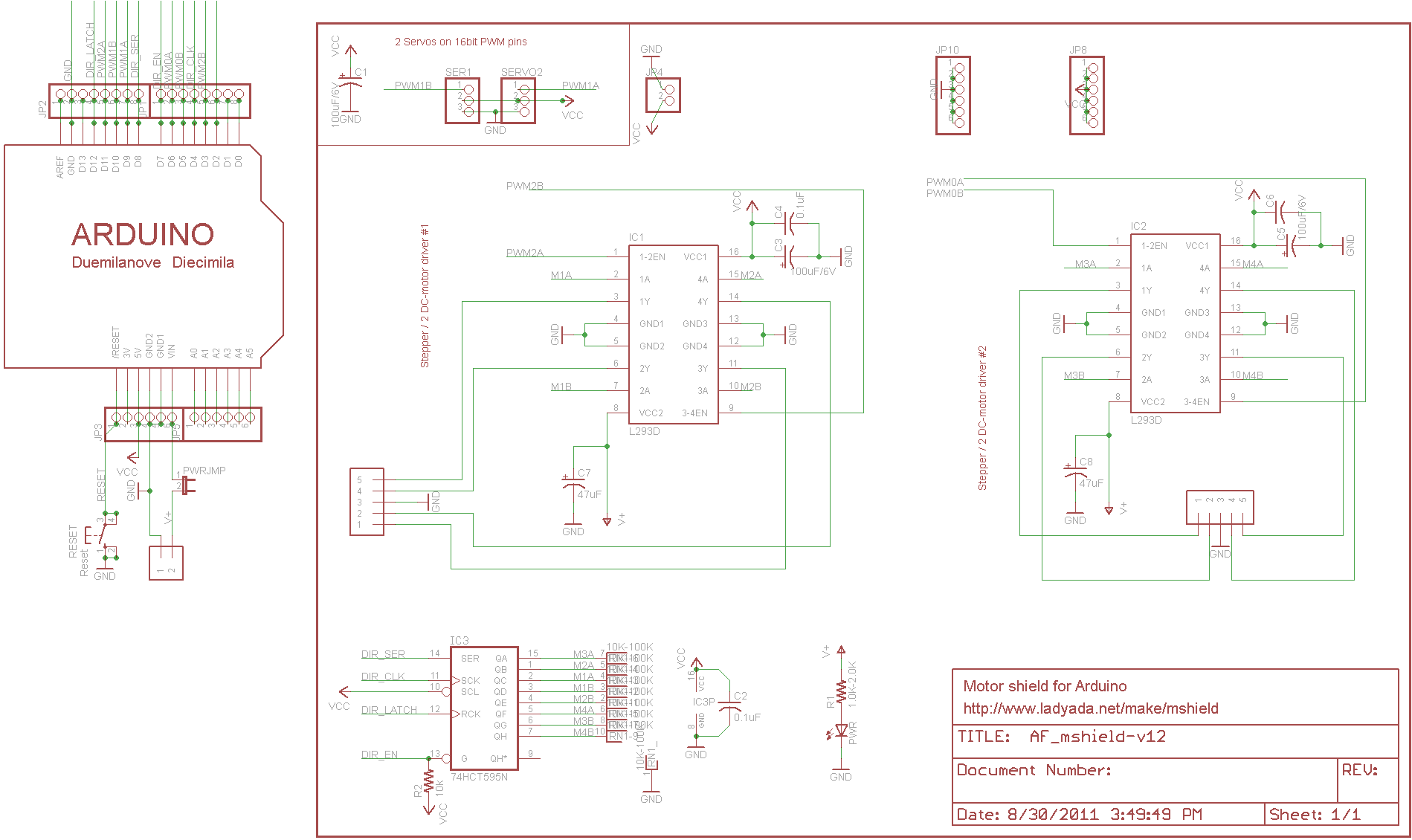
Utiliza estos pines en el Arduino UNO:
Digital 4 – DIR_CLK
Digital 7 – DIR_EN
Digital 8 – DIR_SER
Digital 12 – DIR_LATCH
Digital 11 – PWM_Motor1
Digital 3 – PWM_Motor2
Digital 6 – PWM_Motor3
Digital 5 – PWM_Motor4
Digital 9 – Servo_1
Digital 10 – Servo_2
Descargamos ahora una librerķa de Adafruit para manejar el Shield directamente, ya que si no el manejo podrķa resultar bastante complicado.
La librerķa que necesitamos es esta adafruit-Adafruit-Motor-Shield-library-8119eec, y para instalarla seguimos el procedimiento habitual.
Para iniciar la plaqueta, necesitamos incluir este par de instrucciones:
|
1 2 |
#include <AFMotor.h> AF_DCMotor Motor1(1); |
La primera lķnea incluye la librerķa de AdaFruit en el programa. La segunda crea una instancia de un motor conectado a la puerta M1. La inicialización se define con el parįmetro que le pasamos, que puede ir del 1 = M1 al 4 = M4.
Para establecer la velocidad del motor:
|
1 2 |
Motor1.setSpeed(200); // Definimos la velocidad de Motor1 Motor1.run(RELEASE); |
La primera lķnea define la velocidad el motor a 200. El valor 255 serķa el mįximo de RPM. La segunda lķnea indica que deseaemos dejar el motor en punto muerto.
Para que el motor avance usamos:
|
1 |
Motor1.run(FORDWARD); |
Y para que retroceda:
|
1 |
Motor1.run(BACKWARD); |
Es todo lo necesario para controlar un motor.
Si queremos hacer un primer programa sencillo que haga avanzar el motor unos segundos y después retroceda, he aquķ el programa:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
#include <AFMotor.h> AF_DCMotor Motor1(1); void setup() { Motor1.run(RELEASE); } void loop() { Motor1.run(FORWARD); delay (2000); Motor1.setSpeed(180); Motor1.run(BACKWARD); delay (2000); } |
En caso de querer controlar cuatro motores:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 |
#include <AFMotor.h> AF_DCMotor Motor1(1); AF_DCMotor Motor2(2); AF_DCMotor Motor3(3); AF_DCMotor Motor4(4); void setup() { Serial.begin(9600); // set up Serial library at 9600 bps Motor1.setSpeed(255); Motor2.setSpeed(255); Motor3.setSpeed(255); Motor4.setSpeed(255); } // Por ultimo vamos a mandar moverse adelante y atrįs // para los 4 motores simultįneamente. Usted puede adaptar // a sus necesidades Motor1.run(RELEASE); Motor2.run(RELEASE); Motor3.run(RELEASE); Motor4.run(RELEASE); delay (1000) ; Motor1.run(FORWARD) ; Motor2.run(FORWARD); Motor3.run(FORWARD); Motor4.run(FORWARD); delay (2000); Motor1.run(BACKWARD); Motor2.run(BACKWARD); Motor3.run(BACKWARD); Motor4.run(BACKWARD); delay (2000); |
Enlaces: L293D, Hoja de datos – Quadruple Half-H Drivers
Artķculos relacionados:
• Uso de la placa L298N para motores de CC
• Puente H: Placa controladora de motores L9110S
• Guķa rįpida de placas de control de motores
• Manejo de potencia para motores con el integrado L293D
• Control de motores de CC por Ancho de Pulso (PWM)
Pingback: Guķa rįpida de placas de control de motores | Robots Didįcticos