
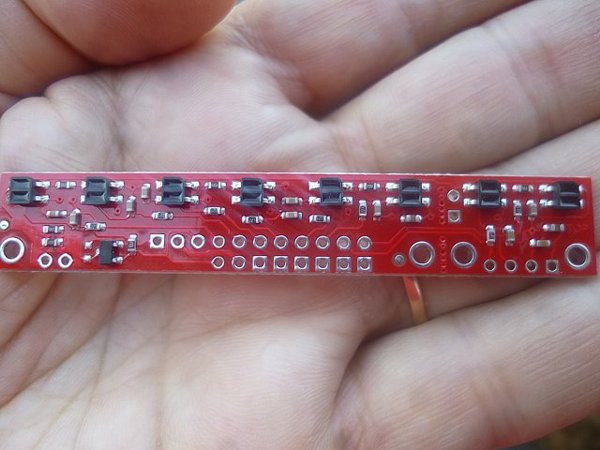
żQuién dice que la electrónica no es linda? Este lo que se ve en la imagen de abajo es un sensor por reflexión a utilizar en un robot sigue-líneas avanzado, para que pueda seguir líneas a alta velocidad…
Por ahora el robot didáctico utilizará con unos sensores más básicos que se llaman CNY70, porque el primer paso en el aprendizaje es hacer que los chicos entiendan bien el concepto. ˇPero después vamos a hacer el robot que VUELE sobre las pistas!
Ejemplo: VIDEO

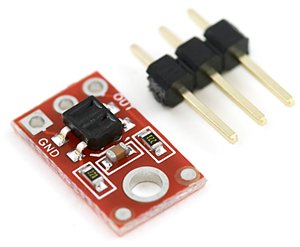
Estos son sensores individuales para robots siguelíneas de la misma familia, cada uno equivalente al CNY70. El tamańo del sensor en sí es mucho más pequeńo; en este caso, están montados sobre un módulo que ya contiene la electrónica necesaria para adaptar y conectar el sensor al microcontrolador.

|  |
Los pequeńos rectangulitos negros son un conjunto de emisor de infrarrojo y receptor, que emiten un haz contra el suelo y detectan el brillo (o capacidad reflectiva) que tiene éste. Utilizando esta medición y los algoritmos correspondientes en el programa de manejo, el robot puede desplazarse con precisión sobre una línea trazada en el suelo. Los sensores vienen en pares porque va uno de cada lado de la línea guía a seguir.
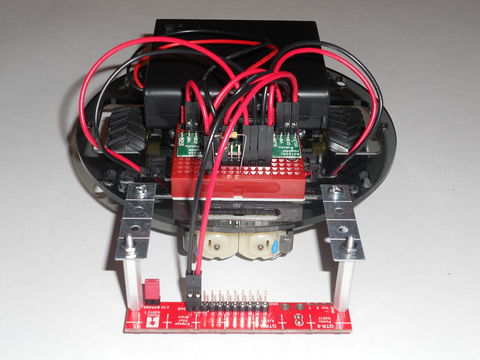
Sensores QTR-8RC
El sensor para siguelíneas de alta velocidad, en lugar de tener dos sensores (uno a cada lado de la línea) lleva una hilera de 8 (cuatro a cada lado). Esto permite que el robot siga la línea a gran velocidad y con un andar de regulación sobre la línea menos abrupto que cuando trabaja con dos únicos sensores.
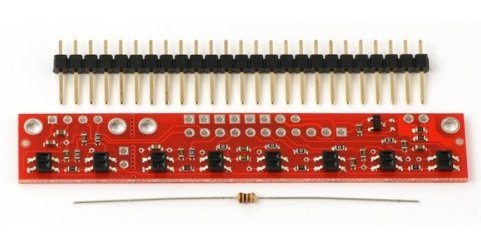

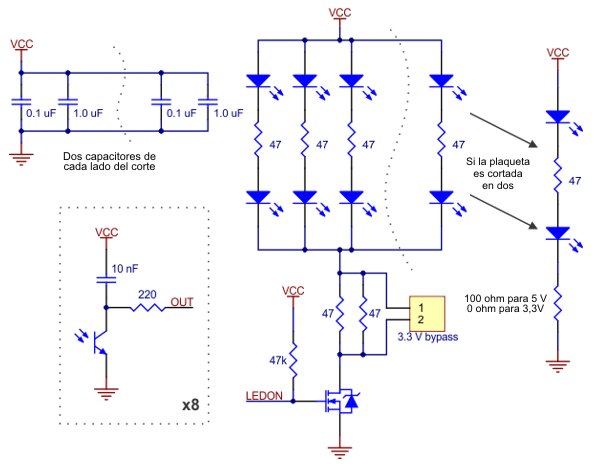
El resistor es para cambiar si se quiere una salida analógica o una salida de pulso (midiendo la longitud del pulso se sabe cuánto está reflejando el sensor, en el caso de que la salida sea analógica, hay que utilizar un convertidor A/D = analógico a digital).
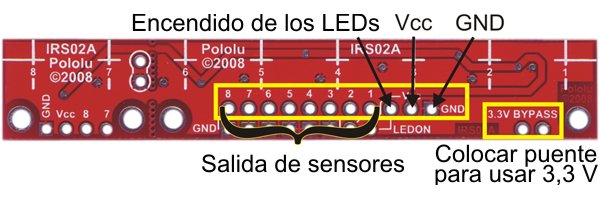
La medición de longitud de pulsos es una opción recomendable, ya que se puede hacer por software o utilizando módulos internos del microcontrolador que son específicos para medir longitud de pulsos. Por esta razón los LEDs no están alimentados todo el tiempo; existe una línea que permite que el funcionamiento del sensor sea pulsado en lugar de poseer una alimentación constante. En la configuración con salida analógica, los LEDs podrían estar alimentados siempre (aunque esto produce un consumo mayor de energía de las baterías). Cuando el circuito está basado en pulsos RC, el funcionamiento debe ser sí o sí pulsado, para que la carga y descarga del capacitor a través del resistor produzca el pulso proporcional a la calidad del reflejo en el objeto inferior, la banda colocada sobre el piso que debe seguir el siguelíneas. No se obtendrían pulsos con una alimentación constante.
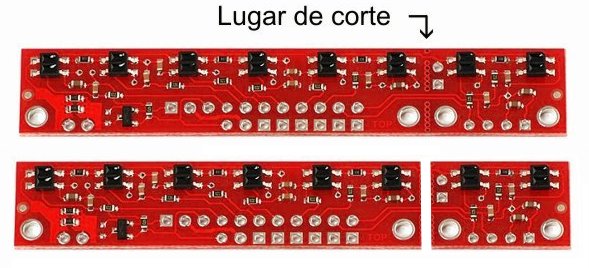
El conjunto de 8 sensores tiene una marca a lo largo de la cual es posible cortar sin dańar el circuito, lo que lo convierte en un conjunto de 6 sensores por un lado, y uno de dos por el otro.
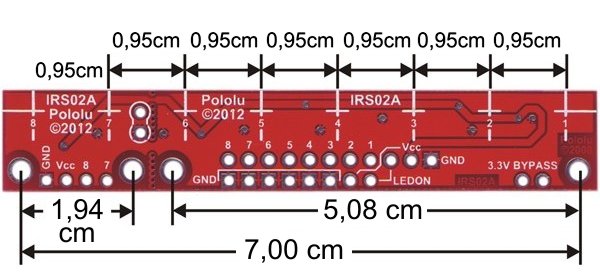
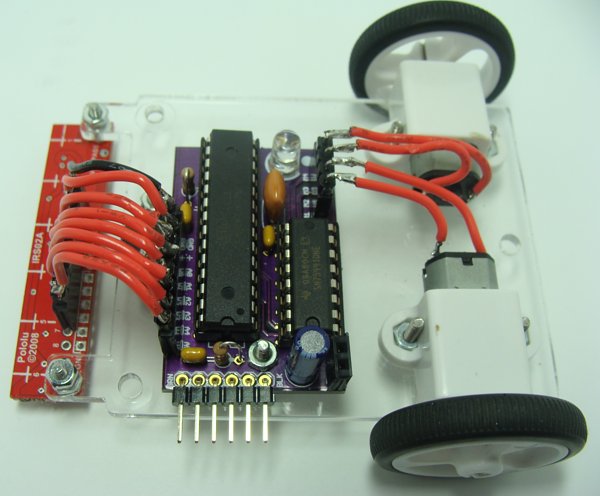
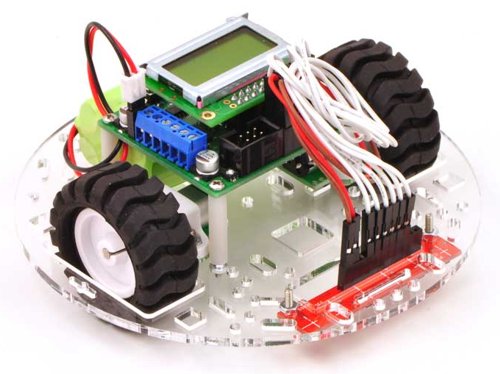
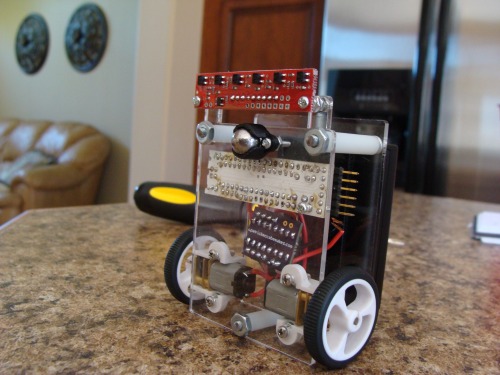
El sensor se instala en el frente del robot, como se observa en las fotografías que siguen con diversos modelos de robots. Obsérvese la escala, teniendo en cuenta que el sensor de reflexión QTR tiene sólo 7 cm de longitud y 12,5 mm de ancho.
Para más detalles se pueden leer los datos de los fabricantes.
- QTR-1RC Reflectance Sensor (2-Pack).
- QTR-8RC Reflectance Sensor Array.
- CNY70: Reflective Optical Sensor with Transistor Output.
Pingback: Ingresar lectura de varios sensores a través de un único pin analógico | Robots Didácticos
Pingback: Diseńos de bases y accesorios para robots con impresora 3D | Robots Didácticos