
El cˇdigo que sigue es un tÝpico ejemplo de escritura a travÚs de la comunicaciˇn serie de Arduino. Escribe ôHolaö a travÚs del puerto COM serie (visible con el Monitor Serie de Arduino, en la pesta˝a Herramientas), y espera durante 1000 milisegundos (1 segundo) al final de cada iteraciˇn del bucle.
|
1 2 3 4 5 6 7 8 |
void setup() { Serial.begin(9600); } void loop() { Serial.println("Hola"); delay(1000); } |
La funciˇn delay() es muy fßcil de usar para crear esperas, pero tiene un inconveniente: deja al microcontrolador źatrapado╗ dentro de la ejecuciˇn de esta funciˇn durante el tiempo que se ha indicado. Si hubiese un cambio en un pin que deberÝa detectar, o si llegase informaciˇn a travÚs de cualquiera de las comunicaciones posibles (serie, I2C o SPI) el microcontrolador sˇlo se enterarÝa luego de completarse el retardo.
Una soluciˇn es crear un retardo que no deje insensible al sistema durante un tiempo tan extenso.
La funciˇn millis()
millis() devuelve el n˙mero de milisegundos desde que la placa Arduino empezˇ a ejecutar, luego de un reinicio o el encendido. Este n˙mero se desbordarß (volverß a cero), despuÚs de aproximadamente 50 dÝas.
Retorna la cantidad de milisegundos en un valor long sin signo (unsigned long).
|
1 2 3 4 5 6 7 8 9 10 11 12 |
unsigned long tiempo; void setup(){ Serial.begin(9600); } void loop(){ Serial.print("Tiempo: "); tiempo = millis(); // imprime el tiempo transcurrido desde el inicio del programa Serial.println(time); // esperar un segundo para no enviar cantidades masivas de datos delay(1000); } |
Nota: Tenga en cuenta que como el valor de retorno para millis() es un long sin signo (unsigned long), pueden producirse errores lˇgicos si un programador intenta hacer operaciones aritmÚticas con tipos de datos mßs peque˝os, como de tipo int. Incluso con los long con signo se pueden producir errores ya que su valor mßximo es la mitad que la de su contraparte sin signo.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
int periodo = 1000; unsigned long TiempoAhora = 0; void setup() { Serial.begin(9600); } void loop() { TiempoAhora = millis(); Serial.println("Hola"); while(millis() < TiempoAhora+periodo){ // espere [periodo] milisegundos } } |
Hacerlo de esta manera solo tiene sentido como ejemplo, ya que es evidente que en este caso directamente se puede usar una funciˇn delay(1000). Pero de todos modos la diferencia entre este ejemplo y el cˇdigo que usa la funciˇn delay(1000) es que el ciclo del cˇdigo que usa la funciˇn millis() se ejecutarß una vez por segundo con la mßxima precisiˇn posible. El bucle en un cˇdigo con delay(1000) se ejecutarß en algo mßs de tiempo, ya que se produce un retardo al ejecutar Serial.println(źHola╗). Ocurrirß igual con cualquier otra serie de instrucciones que se incluyan dentro del bucle.
┐Por quÚ usar millis() en lugar de delay()?
PresentarÚ dos ventajas al utilizar millis() para crear retardos, en comparaciˇn con el uso habitual de delay().
1. Cronometraje preciso
La primera ventaja que discutiremos es la exactitud en el tiempo.
Con millis() podemos garantizar que el bucle se ejecute tantas veces como queramos dentro del retardo sin afectar su extensiˇn, independientemente del tiempo de ejecuciˇn (obviamente, siempre que el tiempo de ejecuciˇn de todas las instrucciones sea menor al retardo deseado).
Con delay() esto no es posible, ya que no sabemos cußnto tiempo durarß el tiempo de ejecuciˇn de todas las instrucciones de programa que estßn dentro del ciclo.
Una sincronizaciˇn precisa como esta es muy ˙til cuando se muestrea a una cierta frecuencia, o cuando se utilizan filtros, entre otras cosas.
2. Sin bloqueo
La ventaja principal de la funciˇn millis() es que no nos impide ejecutar otro cˇdigo mientras estamos źesperando╗.
Ejemplo: digamos que queremos imprimir źHola╗ en el puerto serie una vez por segundo mientras hacemos otras cosas. Esto no es posible con delay(), ya que entrar a la funciˇn delay() pausa todo el cˇdigo.
AquÝ hay una manera de hacer esto:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 |
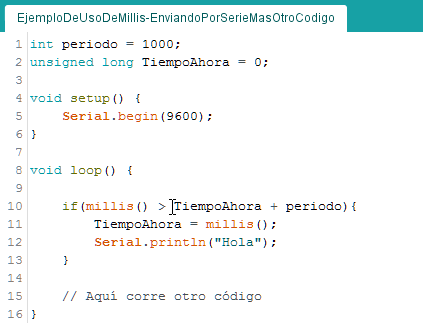
int periodo = 1000; unsigned long TiempoAhora = 0; void setup() { Serial.begin(9600); } void loop() { if(millis() > TiempoAhora + periodo){ TiempoAhora = millis(); Serial.println("Hola"); } // AQUI CORRE OTRO CODIGO // AQUI CORRE OTRO CODIGO // AQUI CORRE OTRO CODIGO // AQUI CORRE OTRO CODIGO // AQUI CORRE OTRO CODIGO } |
Este fragmento de cˇdigo es bastante similar al primer ejemplo que mostramos, excepto que este no bloquea el resto del programa mientras no se estß imprimiendo hacia la lÝnea serie.
3. Un simple secuenciador
Vamos a escribir un ejemplo simple en el que creamos un planificador que imprime ciertos trozos de texto a travÚs de la lÝnea serie a diferentes intervalos.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 |
#define INTERVALO_MENSAJE1 5000 #define INTERVALO_MENSAJE2 7000 #define INTERVALO_MENSAJE3 11000 #define INTERVALO_MENSAJE4 13000 unsigned long tiempo_1 = 0; unsigned long tiempo_2 = 0; unsigned long tiempo_3 = 0; unsigned long tiempo_4 = 0; void print_tiempo(unsigned long tiempo_millis); void setup() { Serial.begin(9600); } void loop() { if(millis() > tiempo_1 + INTERVALO_MENSAJE1){ tiempo_1 = millis(); print_tiempo(tiempo_1); Serial.println("Soy el mensaje 1"); } if(millis() > tiempo_2 + INTERVALO_MENSAJE2){ tiempo_2 = millis(); print_tiempo(tiempo_2); Serial.println("Soy el mensaje 2"); } if(millis() > tiempo_3 + INTERVALO_MENSAJE3){ tiempo_3 = millis(); print_tiempo(tiempo_3); Serial.println("Soy el mensaje 3"); } if(millis() > tiempo_4 + INTERVALO_MENSAJE4){ tiempo_4 = millis(); print_tiempo(tiempo_4); Serial.println("Soy el mensaje 4"); } } void print_tiempo(unsigned long tiempo_millis){ Serial.print("Tiempo: "); Serial.print(tiempo_millis/1000); Serial.print("s - "); } |
AsÝ es como se ven los primeros 60 segundos en el Monitor Serie:
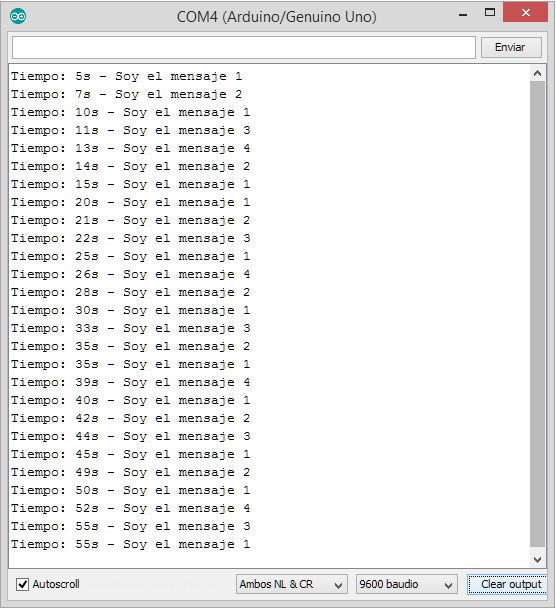
Esta es una manera agradable y fßcil de sincronizar las ejecuciones en su cˇdigo. TambiÚn se puede ejecutar otras partes de cˇdigo simultßneamente.
4. Una nueva funciˇn delay()
La funciˇn delay() estßndar podemos reemplazarla por una implementada con la funciˇn millis(). Si bien parece que es lo mismo, ya veremos a continuaciˇn quÚ ventaja nos puede ofrecer su estructura de programa:
|
1 2 3 4 5 6 7 8 |
unsigned long Contador = 0; void Espera(int valor) { Contador = millis() + valor; do { } while (Contador<=millis() && digitalRead(12)==HIGH); } |
Ademßs de esperar el tiempo indicado, esta funciˇn monitorea un pin de entrada del Arduino que haya sido cableado para detectar que ha sucedido alg˙n evento externo. Si esa se˝al va a nivel BAJO (LOW), se interrumpe el retardo.
Para conectar varias entradas capaces de interrumpir el ciclo de retardo, se pueden agregar mßs elementos en la comparaciˇn de cierre del while, por ejemplo
while (Contador<=millis() && digitalRead(12)==HIGH) && digitalRead(11)==HIGH);
O se puede conectar a la entrada por el pin 12 (u otro pin elegido) un circuito como el que sigue, un AND realizado con lˇgica de diodos de se˝al (1N914 o 1N4148), que tiene la ventaja de que se puede ampliar indefinidamente. TambiÚn se puede implementar con un circuito integrado compuerta AND.
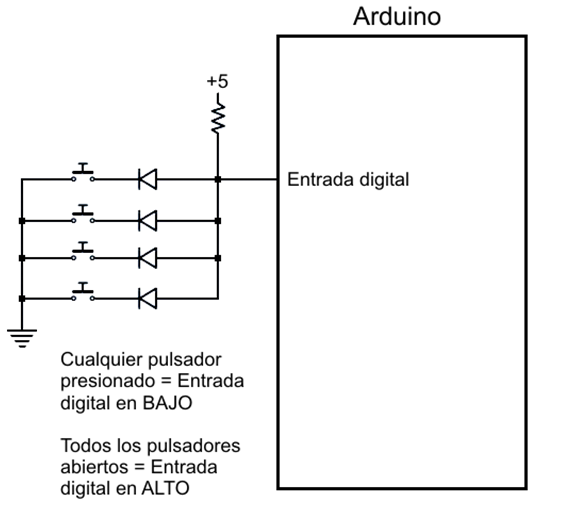
Nota: quede claro que el circuito se representa con pulsadores, pero cada una de estas entradas puede ser un microswith, los contactos de un relÚ, o cualquier otro sensor que cierre circuito hacia GND (tierra o com˙n).
Funciˇn micros() y desbordamiento
Al igual que delay() tiene una versiˇn en microsegundos llamada delayMicroseconds(), la funciˇn millis() tiene como compa˝era para tiempos breves la funciˇn micros(). Si necesitamos una mejor resoluciˇn, micros() puede ser el camino a seguir. Sin embargo, tenga en cuenta que el valor devuelto por micros() se desbordarß (volverß a cero) despuÚs de aproximadamente 70 minutos, en comparaciˇn con los 50 dÝas de millis(). ôDesbordamientoö significa que el conteo llega a su mßximo, y entonces los valores de retorno de la funciˇn recomienzan desde cero.
Resumen
millis() y micros() son funciones realmente ˙tiles para usar en tareas relacionadas con el tiempo. La opciˇn inicial y tÝpica de un programador de Arduino es usar delay(), que no siempre funcionarß tan bien, principalmente cuando se programan muchas funciones que tienen que ver con el tiempo y existen eventos que no se pueden perder.