
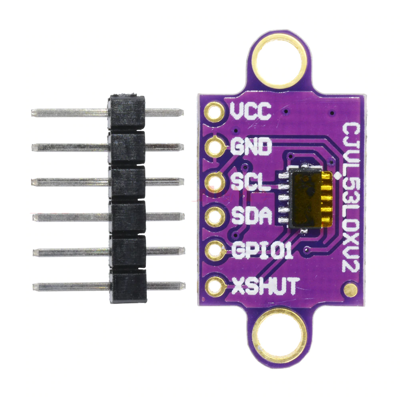
El VL53L0X es un producto novedoso basado en el sistema FlightSense de la empresa ST Microelectronics. Es una tecnologÌa innovadora que permite medir distancia con independencia de la reflectividad del objetivo.
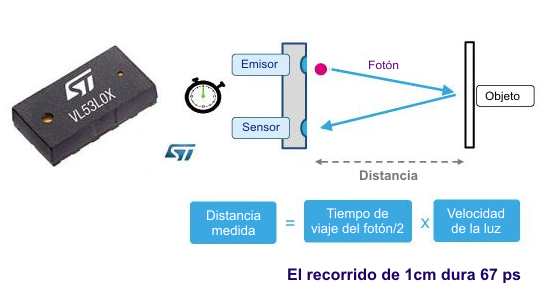
En lugar de calcular la distancia midiendo la cantidad de luz reflejada desde el objeto (en lo que influye significativamente el color y tipo de superficie), el VL53L0X mide con precisiÛn el tiempo que tarda la luz en viajar desde el objeto m·s cercano y volver reflejada hasta el sensor (un proceso llamado Time-of-Fly, o Tiempo de vuelo).
Debido a que utiliza una fuente de luz con un haz muy estrecho, es bueno para determinar la distancia de solamente la superficie que est· directamente delante. A diferencia de los sonares ultrasÛnicos que hacen rebotar sus ondas de sonido, en este caso el ´conoª de la detecciÛn es muy estrecho. A diferencia de los sensores de distancia IR que intentan medir la cantidad de luz que regresa, el VL53L0x es mucho m·s preciso y no tiene problemas de linealidad o ´im·genes doblesª, en las que no se puede saber si un objeto est· muy lejos o muy cerca.
Puede medir distancia con un alcance de hasta 2 m.
El control del procesador y la lectura de los resultados se realizan por medio de una interfaz I2C.
CaracterÌsticas clave
- Emisor infrarrojo: 940 nm
- Distancia: hasta 2000 mm
- DirecciÛn I2C: Programable
- Fuente de luz VCSEL (Vertical-cavity surface-emitting laser = L·ser de emisiÛn de superficie de cavidad vertical)
- Sensor de rango con avanzado microcontrolador
- El chip mide sÛlo 4,4 x 2,4 x 1,0 mm
- MediciÛn de distancia r·pida y precisa
- Mide rango absoluto hasta 2 m.
- El rango reportado es independiente de la reflectividad del objetivo
- CompensaciÛn Ûptica cruzada integrada avanzada para simplificar la selecciÛn del vidrio de cobertura
- Seguro para el ojo humano
- Dispositivo l·ser de clase 1 que cumple con la ˙ltima norma IEC 60825-1: 2014 – 3™ ediciÛn
- F·cil integraciÛn por el sistema de montaje de soldadura del chip
- No tiene Ûptica adicional
- Fuente de alimentaciÛn individual
- Regulador de voltaje integrado en la plaqueta
- Interfaz I2C para control de dispositivos y transferencia de datos
- Pines de entrada salida de uso general Xshutdown (para reinicio) e Interrupt (interrupciÛn)
- DirecciÛn I2C programable
ConexiÛn con Arduino
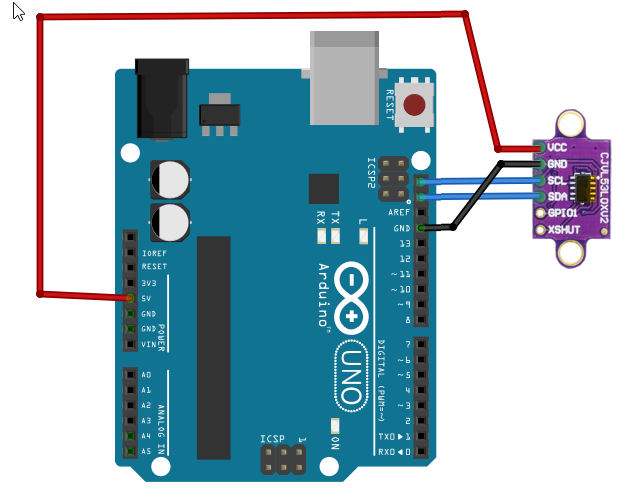
- VCC (en algunos fabricantes VIN) es la fuente de alimentaciÛn, el mÛdulo acepta de 3 a 5V de alimentaciÛn. Use el mismo voltaje en el que se basa la lÛgica del microcontrolador. Para la mayorÌa de los Arduinos es 5V.
- Conecte GND a tierra/alimentaciÛn com˙n (marcado tambiÈn GND en el Arduino).
- Conecte el pin SCL al pin SCL (seÒal de reloj I2C en su Arduino. En un Arduino UNO tambiÈn se conoce como pin A5, aunque est· disponible del lado de los pines digitales. En un Mega es el digital 21 y en un Leonardo es el digital 3.
- Conecte el pin SDA al pin SDA (datos I2C) en su Arduino. En un Arduino UNO tambiÈn se conoce como pin A4, en un Mega es el digital 20 y en un Leonardo es el digital 2.
Los pines adicionales son:
GPIO1: este es un pin que usa el sensor para indicar que est·n listos los datos. Es ˙til para cuando se realiza una detecciÛn continua. Tenga en cuenta que no hay ajuste de nivel en este pin, es posible que no se pueda leer el voltaje de nivel lÛgico de 2,8V en un microcontrolador de 5V (podrÌamos en un Arduino UNO, pero no es seguro). La biblioteca de Adafruit no hace uso de este pin, pero est· ahÌ para usuarios avanzados.
XSHUT – es el pin de apagado/reinicio para el sensor. Por defecto es alto. Hay un diodo de cambio de nivel para que se pueda usar la lÛgica de 3,3 – 5 V en este pin. Cuando el pin va a nivel bajo, el sensor entra en modo de apagado.
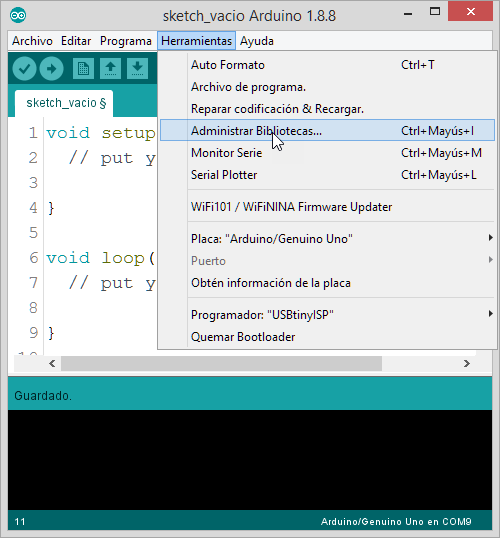
Abra el IDE de Arduino. Mantenga siempre actualizado a la ˙ltima versiÛn.
Abra en el men˙ HERRAMIENTAS la opciÛn ADMINISTRAR BIBLIOTECAS.
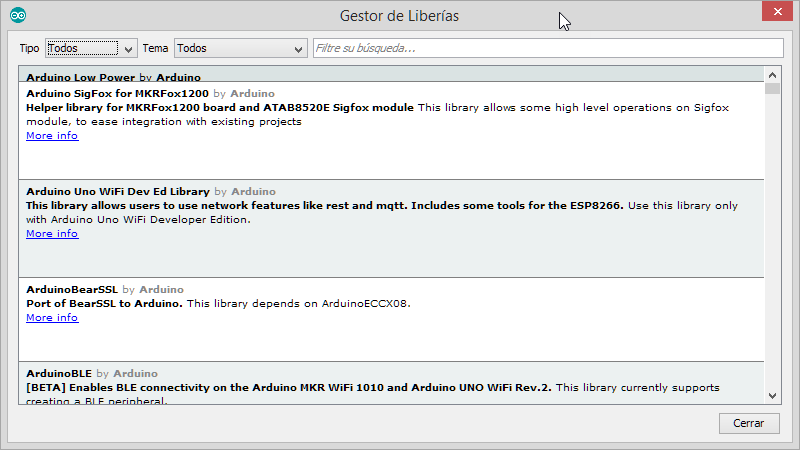
B˙squeda y carga en el IDE Arduino de la biblioteca del VL53L0X
La elecciÛn ADMINISTRAR BIBLIOTECAS abrir· la siguiente ventana del Gestor de Bibliotecas:
En esa ventana tenemos, en la parte superior derecha una ventana de editor con la leyenda ´Filtre su b˙squeda…´, donde debemos escribir el nombre del dispositivo:
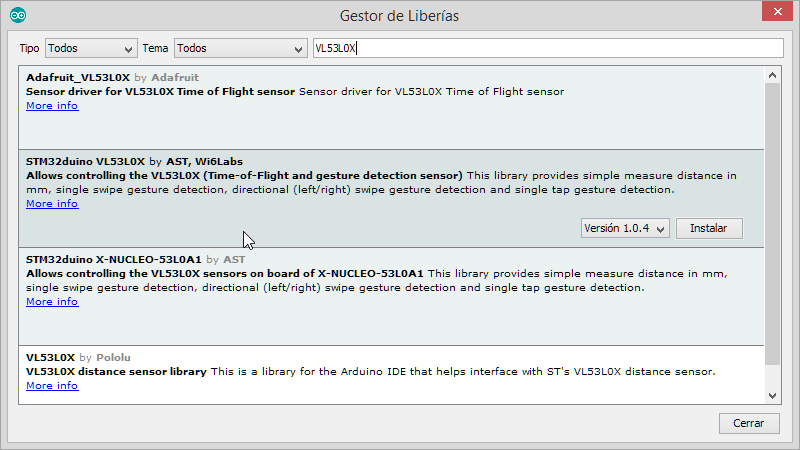
Esta b˙squeda nos ofrece varias bibliotecas. Para Arduino UNO y relacionados tenemos la de Adafruit y la de Pololu. En artÌculos en la web recomiendan la de Pololu, porque es m·s simple que la del otro fabricante. De todos modos, podemos instalar ambas. No hay conflictos en esto. El botÛn que dice ´Instalarª aparece cuando se coloca el puntero del mouse en la biblioteca elegida. Si no aparece, es porque ya est· instalada. Si no fuese asÌ, recurra a el enlace ´More infoª y descargue la biblioteca desde el sitio GitHub, en formato ZIP, y proceda a instalarla con las instrucciones que ofrecen AQUÕ.
El gestor nos indicar· que la biblioteca est· lista con un cartel remarcado ´INSTALLEDª.
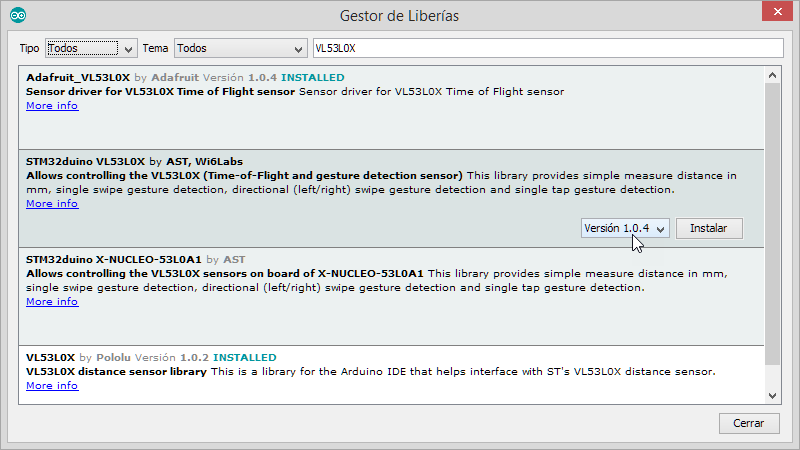
Las bibliotecas quedan listas para ser utilizadas. La que corresponde a Pololu se llama VL53L0X, mientras que la de Adafruit se llama igual y est· dentro de todas las bibliotecas de este fabricante, que llevan su nombre comercial como prefijo.
DirecciÛn para el bus I2C
La direcciÛn por defecto de I2C es 0x29, pero recuerde que es posible programar esta direcciÛn en el VL53L0X. Con la biblioteca Adafruit, hay dos maneras de establecer la nueva direcciÛn. Durante la inicializaciÛn, en lugar de llamar a lox.begin(), se llama a lox.begin(0x30) para establecer la direcciÛn en 0x30. O se puede, m·s adelante, llamar a lox.setAddress(0x30) en cualquier momento. Es importante realizar esta operaciÛn con una sola placa VL53L0X conectada al bus I2C, o todas quedar·n cambiadas.
Programas de prueba
´Continuousª, de Pololu
(Este ejemplo muestra cÛmo usar el ´modo continuoª para tomar mediciones de distancia con el VL53L0X. La informaciÛn se muestra en la pantalla emergente del Monitor Serie, que debe estar fijado en 9600 baudios.)
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
/* This example shows how to use continuous mode to take range measurements with the VL53L0X. It is based on vl53l0x_ContinuousRanging_Example.c from the VL53L0X API. The range readings are in units of mm. */ #include <Wire.h> #include <VL53L0X.h> VL53L0X sensor; void setup() { Serial.begin(9600); Wire.begin(); sensor.init(); sensor.setTimeout(500); // Start continuous back-to-back mode (take readings as // fast as possible). To use continuous timed mode // instead, provide a desired inter-measurement period in // ms (e.g. sensor.startContinuous(100)). sensor.startContinuous(); } void loop() { Serial.print(sensor.readRangeContinuousMillimeters()); if (sensor.timeoutOccurred()) { Serial.print(" TIMEOUT"); } Serial.println(); } |
Y el que sigue es un ejemplo con la biblioteca de Adafruit, con los comentarios traducidos. Siempre con la misma conexiÛn del diagrama de arriba.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 |
#include "Adafruit_VL53L0X.h" Adafruit_VL53L0X lox = Adafruit_VL53L0X(); void setup() { Serial.begin(9600); // Iniciar sensor Serial.println("VL53L0X test"); if (!lox.begin()) { Serial.println(F("Error al iniciar VL53L0X")); while(1); } } void loop() { VL53L0X_RangingMeasurementData_t measure; Serial.print("Leyendo sensor... "); lox.rangingTest(&measure, false); // si se pasa true como parametro, muestra por puerto serie datos de debug if (measure.RangeStatus != 4) { Serial.print("Distancia (mm): "); Serial.println(measure.RangeMilliMeter); } else { Serial.println(" Fuera de rango "); } delay(100); } |
En el programa que sigue, para reducir el ruido de la mediciÛn se muestra el promedio de varias medidas. Las lÌneas comentadas muestran los distintos modos de funcionamiento.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 |
/* ################## Sensor VL53L0X ############################# * Filename: VL53L0X_Ej1.ino * DescripciÛn: Test Medidor Distancia Laser * Autor: Jose M™ Morales * RevisiÛn: 12-04-2017 * Probado: ARDUINO UNO r3 - IDE 1.8.2 (Windows7) * Web: www.playbyte.es/electronica/ * Licencia: Creative Commons Share-Alike 3.0 * http://creativecommons.org/licenses/by-sa/3.0/deed.es_ES * ############################################################## */ #include <Wire.h> #include <VL53L0X.h> VL53L0X sensor; int n_Samples = 5; // numero de muestras para promediar //#define LONG_RANGE // Aumenta sensibilidad, +rango, -precision //#define HIGH_SPEED // Mayor velocidad, menor precision #define HIGH_ACCURACY // Alta precision, menor velocidad void setup() { Serial.begin(9600); Wire.begin(); sensor.init(); sensor.setTimeout(500); //###### Parametros Medida simple ########## #if defined LONG_RANGE // Limite de la tasa de retorno (por defecto 0.25 MCPS) sensor.setSignalRateLimit(0.1); // Periodo de pulso laser (por defecto 14 y 10 PCLKs) sensor.setVcselPulsePeriod(VL53L0X::VcselPeriodPreRange, 18); sensor.setVcselPulsePeriod(VL53L0X::VcselPeriodFinalRange, 14); #endif #if defined HIGH_SPEED // reduce tiempo estimado a 20 ms (por defecto 33 ms) sensor.setMeasurementTimingBudget(20000); #elif defined HIGH_ACCURACY // incrementa tiempo estimado a 200 ms sensor.setMeasurementTimingBudget(200000); #endif } void loop() { float DISTANCIA = getDISTANCIA (n_Samples); if (sensor.timeoutOccurred()) { Serial.println(" TIME OUT"); }else { if (DISTANCIA< 2) Serial.println("Fuera de Rango (d < 2 cm)"); else if (DISTANCIA>220) Serial.println("Fuera de Rango (d > 2 m)"); else { Serial.print(DISTANCIA, 1); // distancia en cm y 1 decimal Serial.println(" cm"); } } delay (300); } float getDISTANCIA(int n) { // hacemos "n" mediciones float SUMA_n = 0; for (int i = 0; i < n; i++) { SUMA_n += sensor.readRangeSingleMillimeters(); } return( SUMA_n /n /10); // Promedio en centimetros } |
Pingback: Sistema para estacionamiento de un auto y para evitar acercarse demasiado a otro vehÌculo | Robots Did·cticos