
El robot seguidor de luz es un siguiente paso en la comprensiÛn de los alumnos de cÛmo se puede hacer reaccionar a un robot frente a un estÌmulo externo.
Es este caso, el estÌmulo que produce movimientos de respuesta es la luz. El robot, puesto en un ambiente a oscuras, se mantiene quieto. Al iluminarlo, se accionar·n los motores de tal modo que seguir· los movimientos de un haz de luz (una linterna, por ejemplo), girando y persiguiendo siempre el punto de mayor iluminaciÛn.
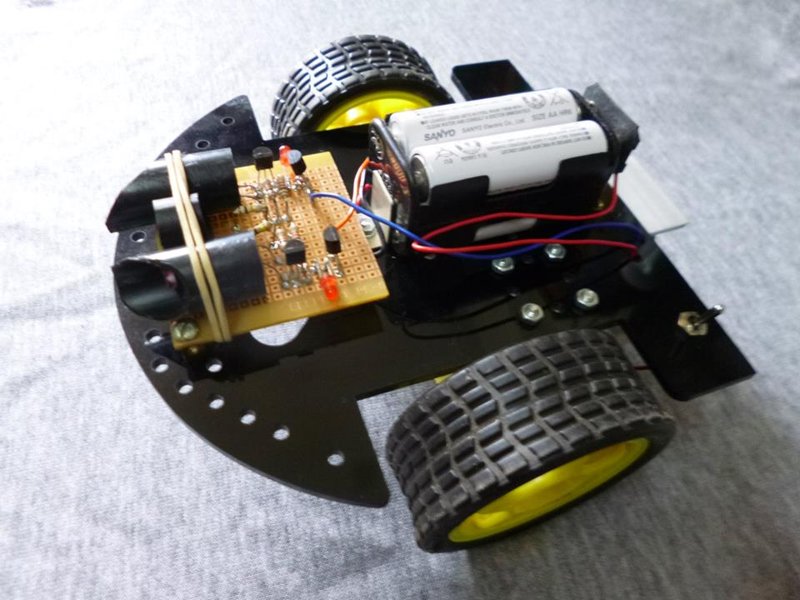
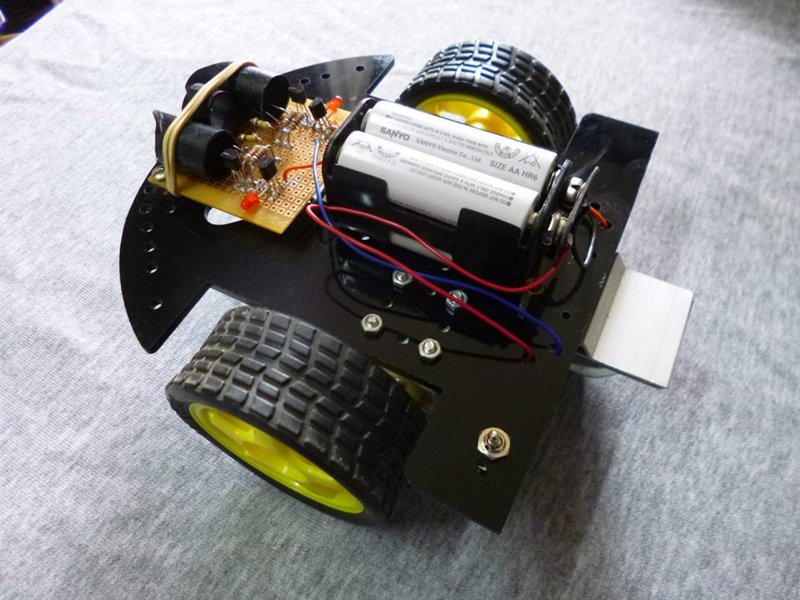
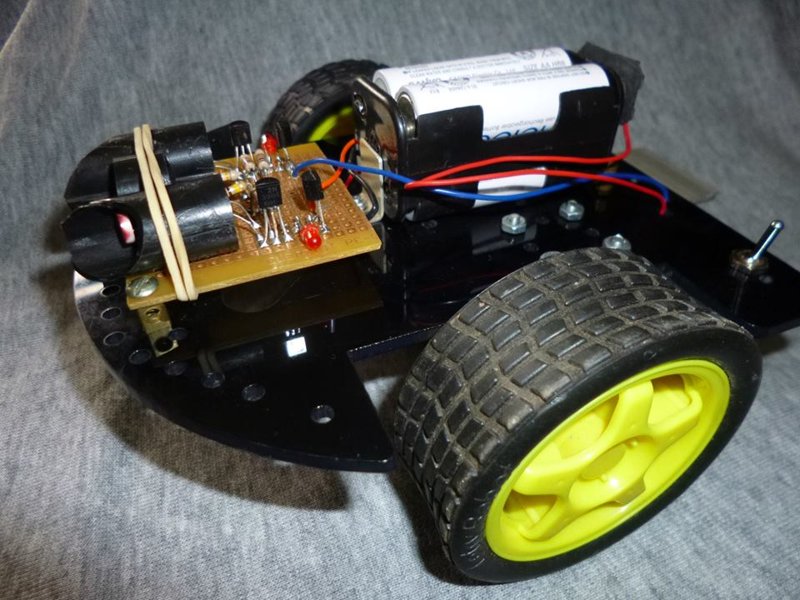
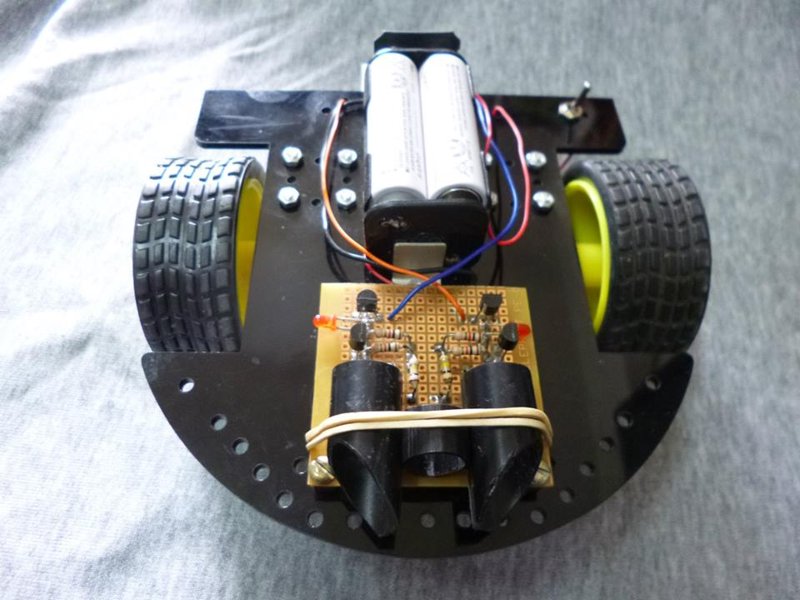
Los elementos sensoriales (o sensores) son resistores variables ante la luz (Light Dependent Resistor, o LDR), en castellano llamados fotorresistencias.
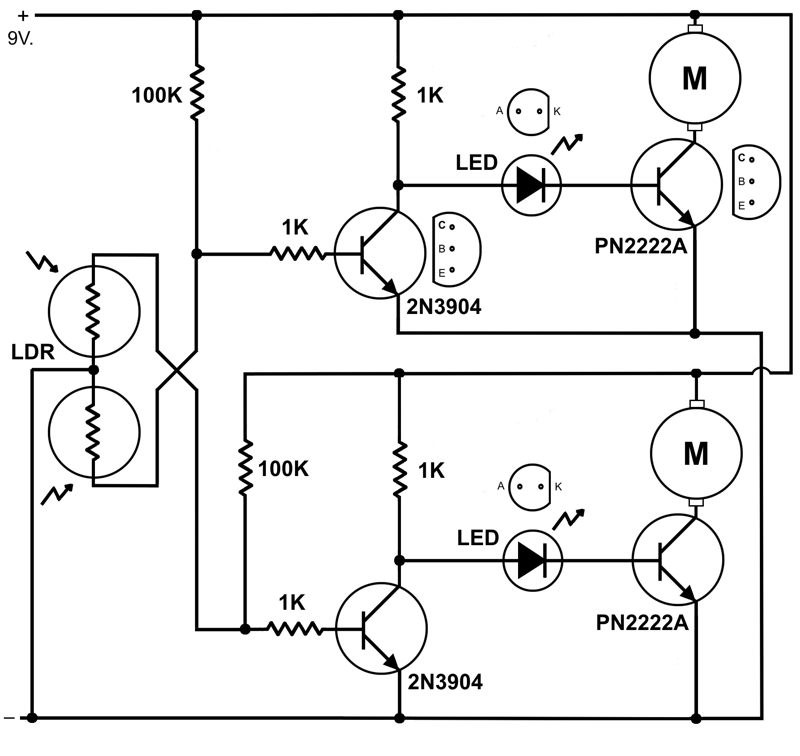
Como el robot responde con movimientos sobre un plano, que ser·n en seguimiento de la luz hacia la derecha o hacia la izquierda, tendremos dos de estos sensores LDR, y dos circuitos iguales que amplifican su seÒal hasta el nivel de potencia que necesita cada motor para moverse.
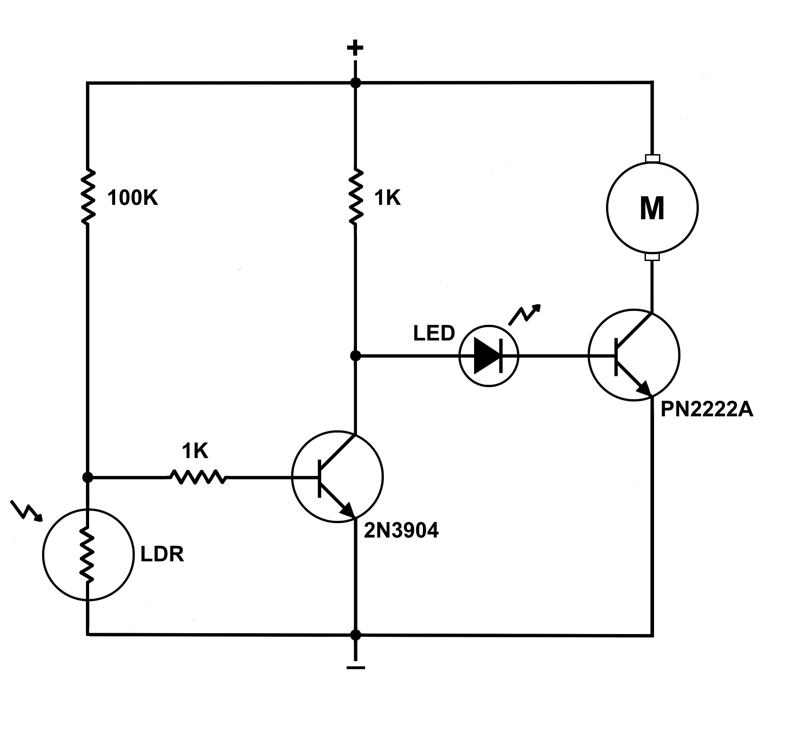
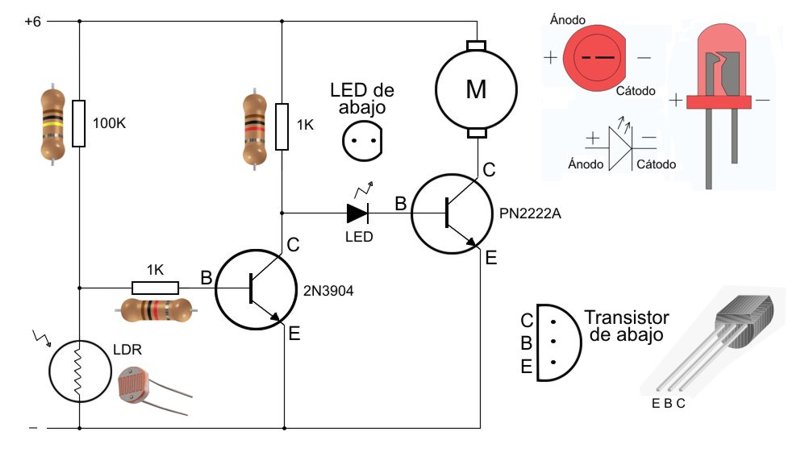
El funcionamiento se basa en que el fotorresistor, al ser iluminado, disminuye fuertemente su valor resistivo. Esto interrumpe la corriente del primer transistor conectado a Èl, el 2N3904. El resistor de 1K (1.000 ohms) que une el sensor de la base del transistor cumple solamente una funciÛn de separaciÛn de ambos circuitos. El descenso del valor de corriente en la base del transistor 2N3904 hace que Èste se abra como una llave (circuito colector-emisor). Esto habilita el paso de corriente desde el voltaje positivo hacia la base del transistor amplificador final, el PN2222A, a travÈs del diodo emisor de luz (LED), que se coloca en esa parte del circuito sÛlo a modo de indicador: si est· iluminado, el motor gira hacia adelante. El transistor PN2222A se cierra como una llave (circuito colector-emisor), y de este modo el motor recibe alimentaciÛn.
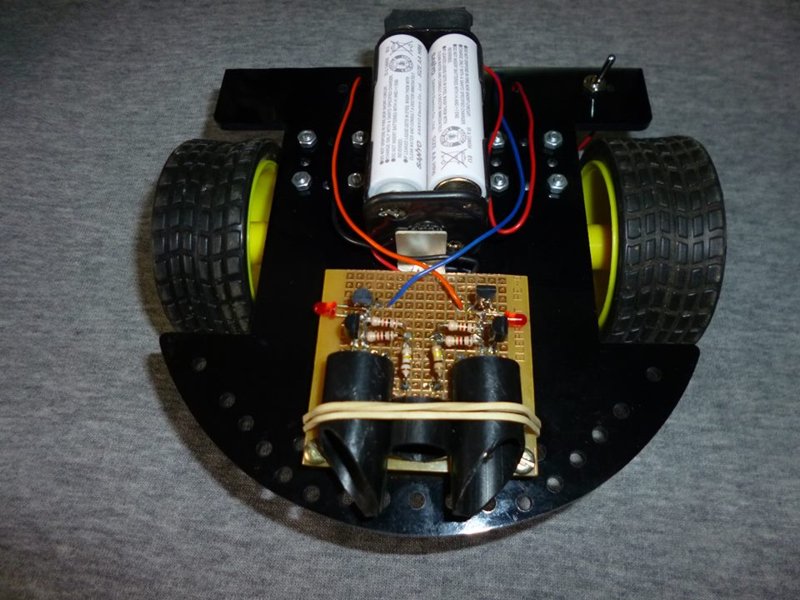
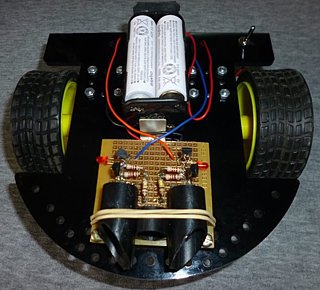 Si se observa el cableado del robot en las fotos ubicadas m·s abajo, se puede ver el circuito del sensor izquierdo (Nota: vÈase la izquierda del robot desde su propio punto de vista, como si fuese una persona; en la imagen con el robot de frente su izquierda est· a la derecha de la imagen) est· conectado al motor derecho del robot, y a la inversa, el sensor derecho est· conectado al motor izquierdo del robot. (Cables naranja y azul, respectivamente.)
Si se observa el cableado del robot en las fotos ubicadas m·s abajo, se puede ver el circuito del sensor izquierdo (Nota: vÈase la izquierda del robot desde su propio punto de vista, como si fuese una persona; en la imagen con el robot de frente su izquierda est· a la derecha de la imagen) est· conectado al motor derecho del robot, y a la inversa, el sensor derecho est· conectado al motor izquierdo del robot. (Cables naranja y azul, respectivamente.)
1. Una luz de frente activa ambos motores.
2. Una luz desde el lado derecho activa al motor izquierdo (lo que causa que el robot gira hacia la derecha, siguiendo la luz).
3. Una luz desde el lado izquierdo activa al motor derecho, lo que hace que el robot gire hacia la izquierda, siguiendo la luz.
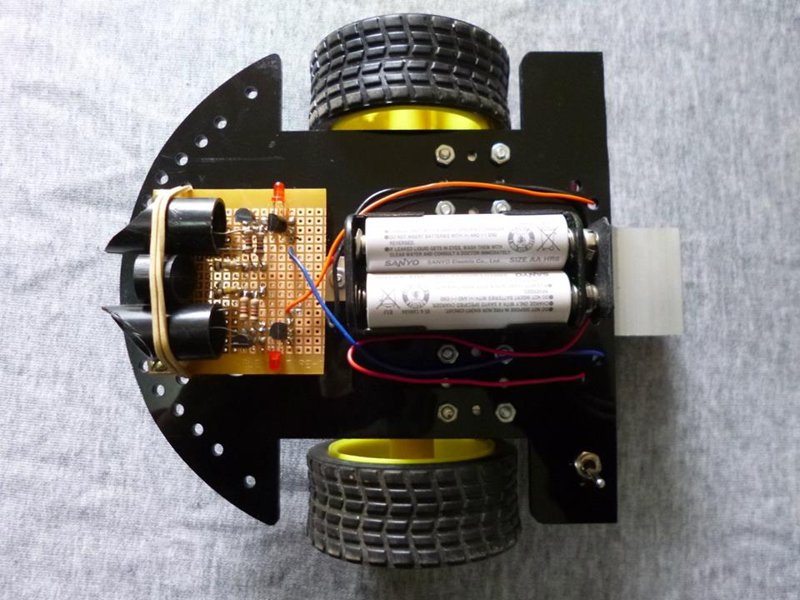
Observando la foto del robot tomado desde arriba es m·s f·cil comprender la din·mica del funcionamiento. Los sensores tienen colocados unos tramos de tubo pl·stico que ayudan a separar claramente la direcciÛn de la luz.
Quien lo desee puede observar una buena explicaciÛn sobre la parte del circuito sensor de luz en este video did·ctico.
Pingback: Sensores - LDR - Descripción y funcionamiento