
En este artÌculo analizo las opciones para las ruedas principales, de movimiento, del robot did·ctico social, y la b˙squeda (constante) de muy bajo costo, o si es posible CERO costo. SÛlo me quedarÈ tranquilo cuando se pueda armar totalmente con material de desarme de equipos descartados.
Ruedas
Gracias a un dinero donado pude comprar 96 ruedas de la marca RASTI de 53 mm de di·metro y sus juegos de ejes con dos puntas de encastre.

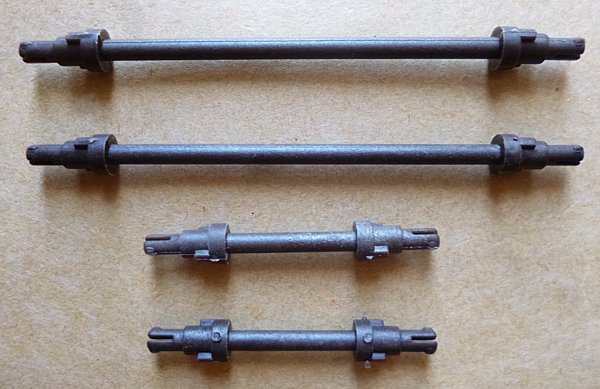
Los ejes son del viejo estilo, no como se fabrican ahora, lo mismo en el caso de las ruedas, aunque en Èstas no se nota gran diferencia. Con los ejes es otra cosa, ya que los ejes actuales son de metal con el cabezal de empalme pl·stico, mientras que los antiguos son totalmente de pl·stico blando.

Los ejes cortos (96 en total) tienen 40 mm de longitud total, 17 de la parte recta del eje en sÌ y el resto en 11,5 mm de cada uno de los cabezales. La rigidez en el caso de este eje corto es aceptable.
Los ejes largos (48 en total) tienen 74 mm de longitud total, 51 de la parte recta del eje en sÌ y el resto en 11,5 mm de cada uno de los cabezales. El eje largo se dobla con facilidad.
Los 96 ejes cortos parecen ofrecer la mejor soluciÛn para empalmar la rueda con el mecanismo de reducciÛn del motor en el robot did·ctico. La tarea a pensar seriamente es crear un buje que, en su fricciÛn contra el eje, no lo desgaste ni tampoco se desgaste demasiado. DeberÌa tener, incluso, un punto de ingreso de grasa lubricante.
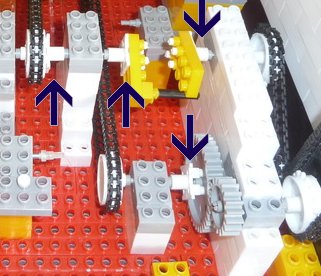
En el centro de la imagen de abajo se observan las piezas de Rasti que, de a dos, cumplen esta funciÛn (de color gris). Pero no me parece que su durabilidad en un uso m·s intenso, como en un robot para aprendizaje, sea adecuada.

El montaje que debemos estudiar no utilizar· las piezas de RASTI que se diseÒaron como ìbujesî, y de uno de los extremos debemos estudiar el mÈtodo de anclaje (conexiÛn) con el mecanismo de engranajes de reducciÛn de los motores.
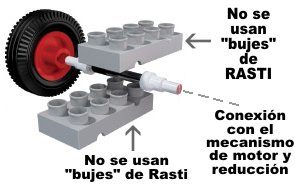
Se muestra un diagrama del fabricante del montaje de ruedas con un eje corto (no hacer caso a los colores, no coinciden con los reales de ninguna de las dos clases de ejes que he conocido). Le sigue una imagen con mis anotaciones.
El ìbujeî ideal serÌa, como lo son las piezas de ladrillos encastrables originales, una pieza compuesta de dos partes, con su conducto para el eje, dos orificios de fijaciÛn y uno en la parte superior, centrado y conectado con el conducto del eje, por donde aplicar la grasa adecuada. Debo averiguar bien con quÈ material se deberÌa hacer esta pieza que dibujÈ, m·s o menos, en la imagen de abajo.

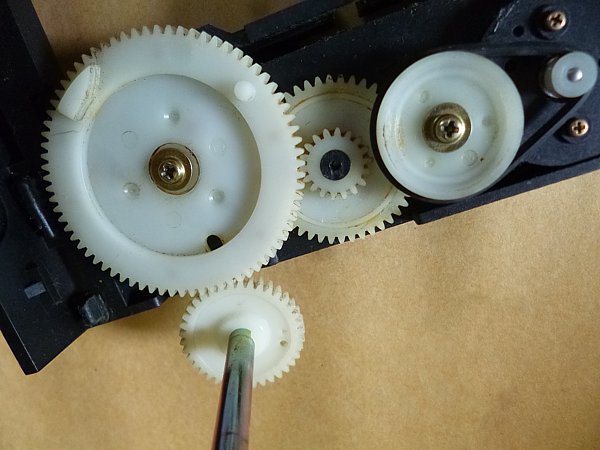
El prÛximo paso necesario es conectar el extremo opuesto del eje de la rueda al mecanismo de reducciÛn de la unidad de CD-ROM, sobre el engranaje de salida. Quiz·s la mejor opciÛn es buscar un engranaje que se ajuste al de este mecanismo y colocarlo en el extremo del eje de RASTI. Uno de los problemas es que en estos mecanismos (como ya comentÈ en artÌculos anteriores) hay una variaciÛn muy grande de di·metros de engranaje, de paso y cantidad de dientes.
Sin embargo, es una posibilidad m·s interesante que la de unir directamente el eje al engranaje de salida, ya que aporta facilidad de desarme para el mantenimiento y reemplazo de partes.
En este caso se conectarÌa asÌ:
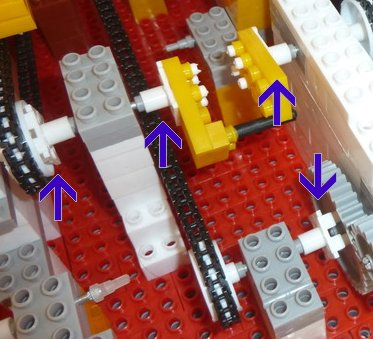
Otra opciÛn (con costo de compra, y lamentablemente sin posibilidad de comprar las piezas individuales, ya que solamente se pueden adquirir como parte de kits con muchas otras piezas), serÌa usar el conector que mostramos remarcado en la foto que sigue:
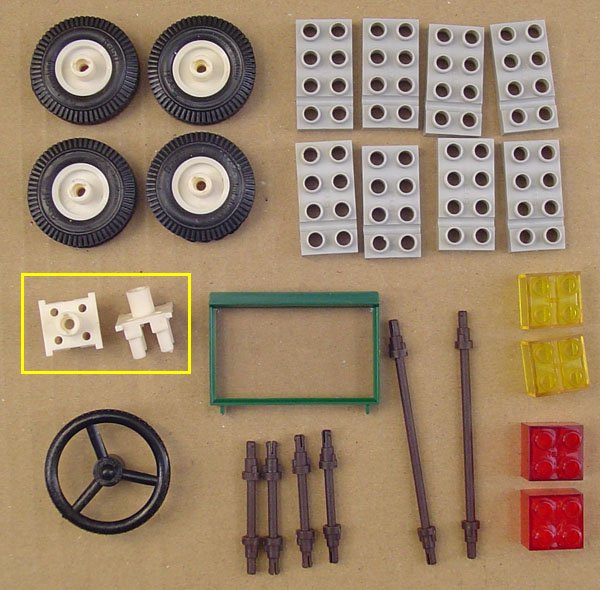
Este conector nos permitirÌa unir el eje a aquellos engranajes de salida que tengan suficiente di·metro, en los cuales se puedan perforar los 4 agujeros de encastre para los postes de amarre de esta pieza.
En las fotos que siguen muestro algunos ejemplos de uso de esta pieza.
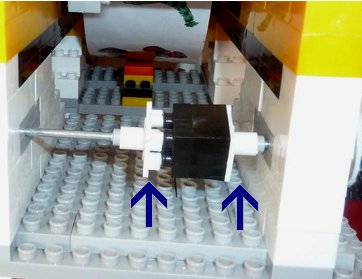
Otra posibilidad es sacar molde del encastre del cubo de la rueda y de la parte circular de la llanta pl·stica, y crear nuestra propias piezas con epoxi o alg˙n pl·stico derretible. Puede ser difÌcil… o no. No tengo experiencia en esta tarea y deberÌa hacer pruebas.

TambiÈn se podrÌa tomar un molde del punto de uniÛn con el eje de la pieza de encastre de cuatro postes que vimos antes, sÛlo que del lado de los postes insertables se colocarÌa un cÌrculo pl·stico a unir con el engranaje, o un engranaje que coincida en el engranaje de salida de la caja de reducciÛn.
Otra manera es unir un cÌrculo de pl·stico al extremo del eje (muy bien centrado, y esto me resulta difÌcil de lograr), y que Èste se pueda pegar o atornillar (aunque los tornillos ìpesanî y todo lo que sea peso adicional evitable debe ser muy tenido en cuenta en este diseÒo) a los engranajes de salida de la caja de reducciÛn.
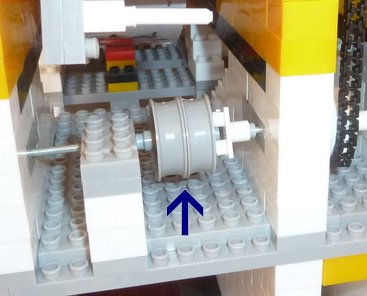
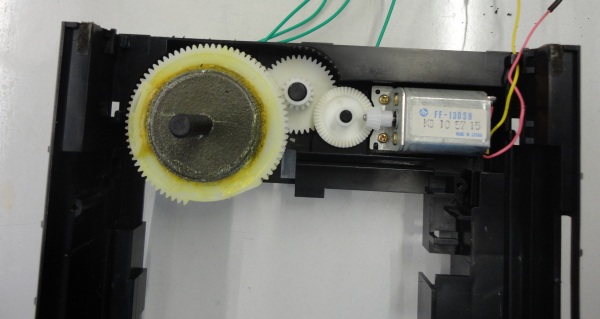
AquÌ se observa una soluciÛn similar, un tanto tosca, que encontrÈ en Internet (pero es m·s o menos la idea). Obviamente, se hizo utilizando pegamento. El eje que sobresale del disco gris de la foto serÌa, en nuestro caso, el eje de RASTI al que va unida la rueda.
El primer intento ser·: engranajes acoplados al eje y a la salida de la caja de reducciÛn
Ya que en principio parece ser menos complejo agregar un engranaje en el extremo opuesto del eje de la rueda, he desarmado una serie de video-caseteras VHS viejas y descartadas que comprÈ en remates, obteniendo varios pares de engranajes.
Recordemos que cada robot tiene un par de motores y sus juegos de engranaje asociados, de modo que siempre estamos hablando de conjuntos de dos piezas.

El trabajo ahora es buscar de aparear estos engranajes con los de salida de los conjuntos de reducciÛn que obtuve del desarme de unidades de CD-ROM (muy variados en di·metro y paso, como ya dije), y luego buscar la forma m·s segura y pr·ctica de unirlos al extremo del eje. El resto es montar todo sobre una base.
ContinuarÈ con este tema…
M·s informaciÛn:
- Base robÛtica
- Robot Did·ctico Social: Buscando los motores (pares logrados)
- Robot Did·ctico Social: Buscando los motores (rescate de partes)
- Puente H con MOSFET recuperados de discos rÌgidos antiguos
- MÈtodo para marcar el centro de una forma circular
- RecuperaciÛn de partes de un aromatizador de ambientes autom·tico