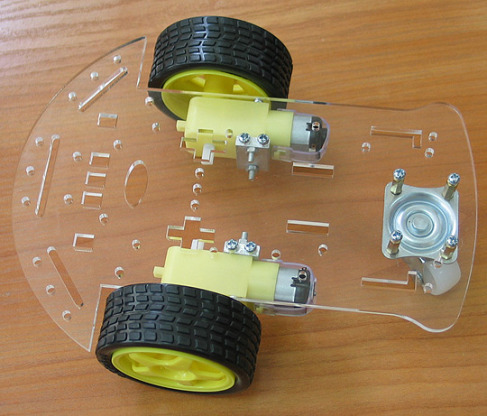
Construir un robot sobre un chassis comprado, que ya tiene los elementos necesarios, es mucho mßs fßcil que crear su mecßnica: se necesita habilidad de manipuleo, las herramientas correctas y precisiˇn en el trabajo
Si queremos crearlo a partir de materiales de desarme, ya es otra cosa. Un robot necesita una base donde montar la estructura. La plataforma en sÝ no es un gran problema, se puede recortar de partes de cajas de monitores, impresoras, frentes de PCs, bandejas de CR-ROM, chassis y tapas de discos rÝgidos, etc. No necesita tener tantas perforaciones y ranuras como tienen las plataformas comerciales. Agujereamos seg˙n las necesidades.
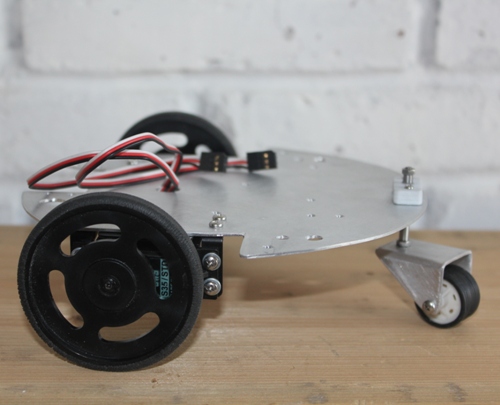
El problema cuando se busca obtener todos los materiales desde la recuperaciˇn de elementos de equipos descartados son las otras tres partes: dos motores con reducciˇn, sus ruedas y una rueda de giro libre, o rueda loca.
En la serie de artÝculos de los ˙ltimos tiempos estuve tratando sobre la recuperaciˇn de motores con reducciˇn que puedan adaptarse a un robot didßctico. Quien los haya leÝdo, se habrß dado cuenta de que no es tan fßcil como parece, ya que la mecßnica de las unidades de CD-ROM, de discos rÝgidos y de disketteras suele ser muy variada. Cuesta mucho conseguir los pares para cada robot. Deben ser idÚnticos en lo mecßnico y tambiÚn elÚctricamente, aunque compensar las diferencias en la parte elÚctrica es mßs fßcil.
Los artÝculos hasta ahora fueron:
- Robot Didßctico Social: Buscando los motores (pares logrados)
- Recuperaciˇn de partes de un aromatizador de ambientes automßtico
- Robot Didßctico Social: Buscando los motores (rescate de partes)
- Material para reciclado de componentes a usar en robˇtica
- Robots para el Taller de Robˇtica
- Un proyecto so˝ado: robots para didßctica
AsÝ que los prˇximos movimientos deben estar orientados a conseguir ruedas que se adapten a los mecanismos de motor y engranaje que he rescatado de unidades de CR-ROM. No deberÝan ser compradas (aunque sÝ pueden provenir de donaciones), o entramos a la situaciˇn de crear un robot que no estÚ formado de partes rescatadas; y este es el programa propuesto.
Otro elemento a lograr es la rueda libre, o rueda loca. El tercer punto de apoyo del robot. Luego vienen los portapilas, y finalmente la electrˇnica. Son los temas que irÚ tratando en unas peque˝as notas que seguirßn. Hay diversas opciones, pero la elegida no debe hacernos muy esclavos en tiempo de trabajo: las horas-hombre tienen valor cuando no se tiene un mecenas que te mantenga.

Prˇximamente, un elemento que por simple no se aleja de ser crÝtico: Ruedas para el robot didßctico.