
por Eduardo J. Carletti
żPor qué motores de avance por pasos? – El problema de los motores de CC comunes

Motores de CC para hobby
Las primeras pruebas caseras con motores se suelen hacer con los de corriente continua (CC), del tipo que se usan en los juguetes. Estos motores giran libremente y a una velocidad alta. Cualquier intento de lograr que uno de estos motores gire una cantidad acotada de recorrido, como por ejemplo dos vueltas, es imposible. Los motores no giran enseguida a una velocidad conocida: hay que calcular un tiempo de arranque, porque la inercia no les permite llegar a la velocidad normal de inmediato. Y cuando se les corta la alimentación continúan girando, también por inercia.
Note el lector que no hablamos de pedirle a uno de estos motores que se mueva sólo una fracción de una vuelta, como por ejemplo un cuarto de revolución, o un valor así. Esto sería aún más difícil de lograr.
Lograr que un motor común de corriente continua gire una fracción de vuelta o una cantidad precisa de vueltas no es sólo muy difícil, es prácticamente imposible. Aún si se controla con extremada precisión la corriente necesaria, buscando fijar con exactitud el tiempo de arranque y detención del motor, de todos modos al cortar la corriente la armadura no se detendrá, ya que continúa moviéndose por inercia, y esta inercia tendrá un valor muy difícil de determinar, ya que dependerá del peso del rotor, la fricción del eje sobre sus cojinetes, la temperatura de las bobinas, núcleos de hierro, imanes y la del propio ambiente, y otras variables del entorno y de la construcción.

Servo RC típico
Agregando engranajes para la reducción de la velocidad se logra atenuar el problema. De todos modos, sigue presentándose el problema de la inercia, lo que producirá un error de posición, aunque disminuido por el factor de reducción de los engranajes. Y se agrega ahora la fricción combinada del juego de engranajes, o sea mayor dificultad para cualquier cálculo.
La manera de lograr una posición precisa con motores de corriente continua es utilizarlos en una configuración de servo. Así funcionan los servomotores que se usan en modelismo (los más accesibles para la experimentación personal), que constan de un pequeńo motor de CC, un juego de engranajes de reducción, un mecanismo de realimentación (que usualmente es un potenciómetro unido al eje de salida) y un circuito de control que compara la posición del motor con la que se desea lograr y mueve el motor para realizar el ajuste.
Los motores paso a paso: Cuestiones básicas
Los motores paso a paso se pueden ver como motores eléctricos sin escobillas. Es típico que todos los bobinados del motor sean parte del estator, y el rotor puede ser un imán permanente o, en el caso de los motores de reluctancia variable (que luego describiremos mejor), un cilindro sólido con un mecanizado en forma de dientes (similar a un engranaje), construido con un material magnéticamente «blando» (como el hierro dulce).
La conmutación se debe manejar de manera externa con un controlador electrónico y, típicamente, los motores y sus controladores se diseńan de manera que el motor se pueda mantener en una posición fija y también para que se lo pueda hacer girar en un sentido y en el otro.
La mayoría de los motores paso a paso conocidos se pueden hacer avanzar a frecuencias de audio, lo que les permite girar muy velozmente. Con un controlador apropiado, se los puede hacer arrancar y detenerse en un instante en posiciones controladas.

Algunos modelos de motores paso a paso
Comportamiento propio de los motores paso a paso:
Los motores paso a paso tienen un comportamiento del todo diferente al de los motores de corriente continua. En primer lugar, no giran libremente por sí mismos. Los motores paso a paso, como lo indica su nombre, avanzan girando por pequeńos pasos. También difieren de los motores de CC en la relación entre velocidad y torque (un parámetro que también es llamado «par motor» y «par de giro»). Los motores de CC no son buenos para ofrecer un buen torque a baja velocidad sin la ayuda de un mecanismo de reducción. Los motores paso a paso, en cambio, trabajan de manera opuesta: su mayor capacidad de torque se produce a baja velocidad.
Los motores paso a paso tienen una característica adicional: el torque de detención (que se puede ver mencionado también como «par de detención», e incluso par/torque «de mantenimiento»), que no existe en los motores de CC. El torque de detención hace que un motor paso a paso se mantenga firmemente en su posición cuando no está girando. Esta característica es muy útil cuando el motor deja de moverse y, mientras está detenido, la fuerza de carga permanece aplicada a su eje. Se elimina así la necesidad de un mecanismo de freno.
Si bien es cierto que los motores paso a paso funcionan controlados por un pulso de avance, el control de un motor paso a paso no se realiza aplicando en directo este pulso eléctrico que lo hace avanzar. Estos motores tienen varios bobinados que, para producir el avance de ese paso, deben ser alimentados en una adecuada secuencia. Si se invierte el orden de esta secuencia, se logra que el motor gire en sentido opuesto. Si los pulsos de alimentación no se proveen en el orden correcto, el motor no se moverá apropiadamente. Puede ser que zumbe y no se mueva, o puede ser que gire, pero de una manera tosca e irregular.
Esto significa que hacer girar un motor paso a paso no es tan simple como hacerlo con un motor de corriente continua, al que se le entrega una corriente y listo. Se requiere un circuito de control, que será el responsable de convertir las seńales de avance de un paso y sentido de giro en la necesaria secuencia de energización de los bobinados.
Características comunes de los motores paso a paso:
Un motor paso a paso se define por estos parámetros básicos:
Voltaje
Los motores paso a paso tienen una tensión eléctrica de trabajo. Este valor viene impreso en su carcasa o por lo menos se especifica en su hoja de datos. Algunas veces puede ser necesario aplicar un voltaje superior para lograr que un determinado motor cumpla con el torque deseado, pero esto producirá un calentamiento excesivo y/o acortará la vida útil del motor.
Resistencia eléctrica
Otra característica de un motor paso a paso es la resistencia de los bobinados. Esta resistencia determinará la corriente que consumirá el motor, y su valor afecta la curva de torque del motor y su velocidad máxima de operación.
Grados por paso
Generalmente, este es el factor más importante al elegir un motor paso a paso para un uso determinado. Este factor define la cantidad de grados que rotará el eje para cada paso completo. Una operación de medio-paso o semi-paso (half step) del motor duplicará la cantidad de pasos por revolución al reducir la cantidad de grados por paso. Cuando el valor de grados por paso no está indicado en el motor, es posible contar a mano la cantidad de pasos por vuelta, haciendo girar el motor y sintiendo por el tacto cada «diente» magnético. Los grados por paso se calculan dividiendo 360 (una vuelta completa) por la cantidad de pasos que se contaron. Las cantidades más comunes de grados por paso son: 0,72°, 1,8°, 3,6°, 7,5°, 15° y hasta 90°. A este valor de grados por paso usualmente se le llama la resolución del motor. En el caso de que un motor no indique los grados por paso en su carcasa, pero sí la cantidad de pasos por revolución, al dividir 360 por ese valor se obtiene la cantidad de grados por paso. Un motor de 200 pasos por vuelta, por ejemplo, tendrá una resolución de 1,8° por paso.
Tipos de motores paso a paso:
Los motores paso a paso se dividen en dos categorías principales: de imán permanente y de reluctancia variable. También existe una combinación de ambos, a los que se les llama híbridos.
Los de imán permanente son los que más conocemos, utilizados, por ejemplo, en el avance de papel y del cabezal de impresión de las impresoras, en el movimiento del cabezal de las disqueteras, etc. Como su nombre indica, poseen un imán que aporta el campo magnético para la operación.
Los motores del tipo de reluctancia variable, en cambio, poseen un rotor de hierro dulce que en condiciones de excitación del estator, y bajo la acción de su campo magnético, ofrece menor resistencia a ser atravesado por su flujo en la posición de equilibrio. Su mecanización es similar a los de imán permanente y su principal inconveniente radica en que en condiciones de reposo (sin excitación) el rotor queda en libertad de girar y, por lo tanto, su posicionamiento de régimen de carga dependerá de su inercia y no será posible predecir el punto exacto de reposo. El tipo de motor de reluctancia variable consiste en un rotor y un estator cada uno con un número diferente de dientes. Ya que el rotor no dispone de un imán permanente, gira libremente si no tiene corriente alimentándolo, o sea que no tiene torque de detención.
Los motores híbridos combinan las mejores características de los de reluctancia variable y de imán permanente. Se construyen con estatores multidentados y un rotor de imán permanente. Los motores híbridos estándar tienen 200 dientes en el rotor y giran en pasos de 1,8 grados. Existen motores híbridos con configuraciones de 0,9° y 3,6°. Dado que poseen alto torque estático y dinámico y se mueven a muy altas velocidades de pulso, se los utiliza en una amplia variedad de aplicaciones industriales.
Motores paso a paso de imán permanente:
Los motores paso a paso de imán permanente se dividen a su vez en distintos tipos, diferenciados por el tipo de bobinado. Existen entonces motores paso a paso de imán permanente unipolares (también llamados «unifilares»), bipolares (también llamados «bifilares») y multifase.
DIFERENTES TIPOS DE CABLEADO DE LAS BOBINAS
(Dibujo simplificado. No refleja la verdadera distribución física de los devanados)
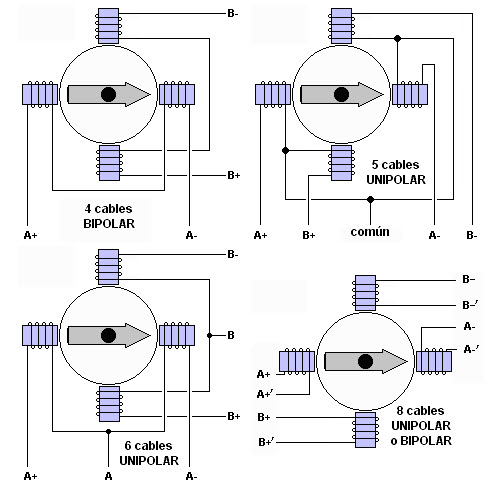
Cada uno de estos tipos requerirá un diferente circuito de control.
Motores paso a paso unipolares:
Los motores unipolares son relativamente fáciles de controlar, gracias a que poseen devanados duplicados. Aunque para facilitar el esquema se dibuja este devanado como una bobina con punto medio, en realidad tienen dos bobinas en cada eje del estator, que están unidas por extremos opuestos, de tal modo que al ser alimentada una u otra, generan cada una un campo magnético inverso al de la otra. Nunca se energizan juntas: por eso lo correcto es decir que tienen una doble bobina, en lugar de decir (como se hace habitualmente) que es una bobina con punto medio. Esta duplicación se hace para facilitar el diseńo del circuito de manejo, ya que permite el uso, en la parte de potencia, de un transistor único por cada uno de los bobinados.
Distribución del bobinado de un motor unipolar
En el esquema más común de conexión se unen los «puntos medios» de ambos ejes (a y b en el dibujo) y se les conecta al positivo de la alimentación del motor. El circuito de control de potencia, entonces, se limita a poner a masa los bobinados de manera secuencial.
Distribución del bobinado de un motor unipolar
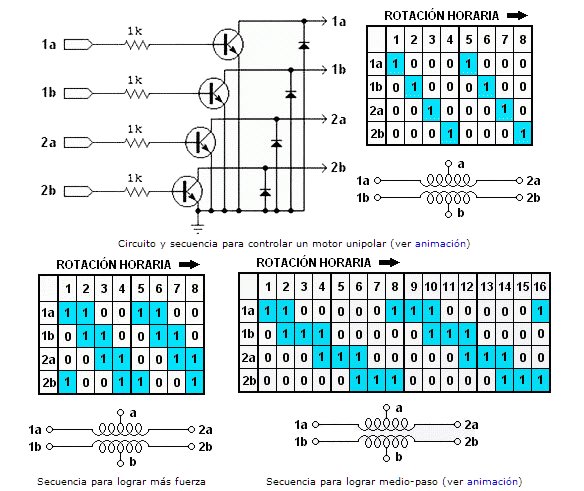
La secuencia de pulsos de un motor unipolar se puede controlar con un contador binario de dos bits con un decodificador, como por ejemplo el integrado CD 4017. La parte de potencia puede ser implementada con un único transistor en cada bobinado.

Control de avance con un único integrado CD 4017
Motores paso a paso bipolares:
Los motores bipolares requieren circuitos de control y de potencia más complejos. Pero en la actualidad esto no es problema, ya que estos circuitos se suelen implementar en un integrado, que soluciona esta complejidad en un solo componente. Como mucho se deben agregar algunos componentes de potencia, como transistores y diodos para las contracorrientes, aunque esto no es necesario en motores pequeńos y medianos.
Como no tienen el doble bobinado de los unipolares (recordemos que en éstos todo el tiempo se está utilizando sólo una de las bobinas duplicadas, mientras la otra queda desactivada y sin ninguna utilidad), los motores bipolares ofrecen una mejor relación entre torque y tamańo/peso.
Distribución del bobinado de un motor bipolar
La configuración de los motores bipolares requiere que las bobinas reciban corriente en uno y otro sentido, y no solamente un encendido-apagado como en los unipolares. Esto hace necesario el uso de un Puente H (un circuito compuesto por al menos seis transistores) sobre cada uno de los bobinados.
Secuencia de pulsos para un motor bipolar
El que sigue es un circuito de ejemplo para el manejo de una de las bobinas (se necesita otro igual para manejar un motor completo). Para más detalles en el funcionamiento de un circuito como este, véase nuestro artículo Puente H.
Circuito de manejo para un motor bipolar
Motores paso a paso de reluctancia variable:
Los motores de reluctancia variable son los motores paso a paso más simples de manejar. Su secuencia se limita a activar cada bobinado en orden, como lo indica la figura. Es común que estos motores tengan un cable común que une todas las bobinas. Estos motores, si se los mueven a mano, no tienen la sensación «dentada» de los otros motores paso a paso, sino que se mueven libres, como los motores de corriente continua.
Circuito de manejo para un motor de reluctancia variable