|
pasión por la robótica en Argentina |
|
[PRINCIPAL] [ROBOTS DIDACTICOS] [NOSOTROS] [ACTIVIDAD] [NOTICIAS] [ARTICULOS] [GALERIA] [ENLACES] [CONTACTO] |
|
Descripción y funcionamiento por Eduardo J. Carletti Introducción
Un robot es un sistema electrónico móvil que, si no es totalmente autónomo, y/o si funciona en común con otros sistemas o con personas, necesitará implementar un intercambio de datos y/o comandos. Hay que pensar entonces en las comunicaciones que este sistema necesita establecer con el exterior. Puede ser con una computadora con la que comparte su "inteligencia", o con otros robots, si es que va a moverse en una interacción orquestada. Está tambien la posibilidad de que el robot necesite intercomunicarse con otros circuitos, como ser instalaciones fijas que le agreguen capacidades (un caso concreto, en el fútbol robótico, es la computadora central, que a su vez está conectada con un sistema de cámara aérea de video que controla los movimientos del equipo y de los contrarios), centrales de carga de energía, sistemas de balizas para el posicionamiento. Por último está la posible relación del robot con un humano. Al hablar de comunicación inalámbrica lo primero que se piensa es en señales de radio. Sin embargo, olvidamos que nos comunicamos habitualmente con equipos electrónicos utilizando una tecnología que se ha vuelto muy común, extremadamente sofisticada y eficaz: las comunicaciones mediante infrarrojos. Cuando se opera un control remoto, lo que uno hace es comunicarse por medio de luz en la gama de los infrarrojos. Un enlace de este tipo puede servir, por ejemplo, para enviar datos al robot desde sensores, establecer y detectar balizas en el entorno, comunicar varios robots entre sí, o para que una persona dé órdenes utilizando un aparato convencional de control remoto (como el de su TV). Se pueden usar infrarrojos para la detección de obstáculos, tema que desarrollamos en la sección Sensores reflectivos. Prácticamente con los mismos elementos que se usan para la comunicación, aunque con una distribución física distinta, es posible hacer rebotar sobre un obstáculo la emisión de una señal infrarroja codificada tal como en los controles remotos y detectarla cuando llega de regreso al robot, con lo cual, en lugar de comunicación tenemos un sistema para la detección de obstáculos. Esta tarea se ha eficientizado al máximo en dispositivos como los GP2D02, GP2D05, GP2D12, etc., de Sharp, que utilizan infrarrojos para medir la distancia a la que se encuentran los objetos dentro de un determinado rango. Enlaces infrarrojos en la práctica El enlace se divide, obviamente, en una sección de emisión y otra de recepción. Los elementos utilizados en los emisores son LEDs especializados, y en ese caso lo más importante es elegirlos bien en base a su potencia de emisión, tipo de lentilla, consumo de energía y frecuencia de operación. Una opción práctica es utilizar un control remoto "universal" como los que se venden en la actualidad a un precio bastante bajo. La parte de la recepción de la señal infrarroja es la más crítica. Lo delicado del sistema está en el receptor. Debe ser capaz de separar la señal real de otras radiaciones de infrarrojo, como la de la luz del sol, e incluso la de algunos equipos de iluminación incandescente, y de fuentes de calor en general. Como la señal la emitimos desde el robot, y a pesar de que utilicemos los elementos más sofisticados y de mayor potencia la energía emitida no será muy grande, los receptores deben ser bien sensibles. Y entonces el problema que se presenta es que pueden ser "cegados" por radiaciones naturales como la de la luz del día, por dar un ejemplo. Los dispositivos disponibles en el comercio, que son los que se ulilizan en los equipos con control remoto, están diseñados especialmente para este uso. Estos sensores tienen señales de salida fácilmente adaptables a los microcontroladores, así que son fáciles de conectar. La parte óptica —lentilla y filtro— también está solucionada. Receptores de infrarrojos Los receptores de infrarrojos codificados integran en un chip el elemento sensible al infrarrojo, una lente, un filtro de espectro y toda la lógica necesaria para distinguir señales moduladas a una determinada frecuencia. Para facilitar a los lectores la posibilidad de implementar un enlace así en sus sistemas, voy a tomar como ejemplo el receptor que encontré disponible en más lugares en el mercado de electrónica de Argentina. Receptor de infrarrojos IRM8601S
El receptor está disponible en una cápsula similar a los transistores TIP y, como los transistores, también tiene tres patas. Existe también una cápsula con cobertura metálica. La conexión es muy simple: una de las patas es la alimentación de 5V, la otra la señal de salida y la tercera es el común o tierra.
 Versión metálica del IRM8601S (y mi dedo) La hoja de datos lista las siguientes características:
Otros receptores de tipo similar:
Emisores de infrarrojo La otra parte del sistema, la emisión, se puede solucionar con un control remoto universal de los que se venden a unos us$ 3,50 en Argentina. Los receptores como el que describimos están ajustados para estos emisores de infrarrojos para electrodomésticos, así que quizás no sea muy práctico complicarse con otros circuitos. Una de las maneras más directas será utilizar el mando para enviar órdenes al robot. La otra sería "hackear" el control remoto y utilizar su plaqueta para nuestro emisor, conectando el robot con el teclado. Si de todos modos se desea implementar un circuito, se puede utilizar, por ejemplo, el integrado codificador HT12E (en Cika cuesta us$ 0,72), que codifica 12 entradas (8 de direcci�n y 4 de datos, o comandos) en una señal en serie (para decodificarlas se utilizaría su hermanito, el HT12D; en Cika cuesta us$ 0,81). El circuito a utilizar es:
Estudiando el formato de las señales del estándar que utilizan los controles remotos (o mando a distancia, como se les llama en algunos lugares), se puede crear la señal por programa, en un microcontrolador. MCP2120 : Codificador / Decodificador de infrarrojo El integrado MCP2120 de Microchip (disponible en Argentina en Cika por us$ 3,45) es muy interesante. Permite realizar una conversión entre los datos de una UART (Universal asynchronous receiver transmitter = Receptor Transmisor Asincrónico Universal) y la codificación IrDA, que es uno de los formatos de datos de los controles remotos de infrarrojos. Los datos de una UART estándar (dentro de un microcontrolador, por ejemplo) se ingresan a este chip y se convierten en pulsos para enviar a un emisor de infrarrojos. Los datos recibidos por un receptor de infrarrojos como el que describimos antes se ingresa a este integrado y son convertidos a datos para una UART estándar. La velocidad de transferencia (baud rate) se define con unas entradas del chip, que permiten seleccionar entre un amplio rango de velocidades (dependiendo también de la frecuencia de reloj que se aplica al circuito). Por ejemplo, con un reloj de 14,7456 MHz se obtienen velocidades de 19.200, 38.400, 78.600, 115.200 y 230.400 baudios. Este último sería el valor máximo de velocidad que se puede alcanzar.
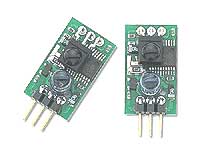
Módulos de transceptor para enlace infrarrojo Bien, también existe esta opción: pidiéndolos a EEUU y pagando us$ 49 (más los gastos de envío) se puede contar con unos módulos ya armados que permiten una comunicación bidireccional por infrarrojos. Son unas pequeñas plaquetitas, cosa que se observa en la imagen, aunque las medidas no las encontré. Se pueden ver los datos de estos módulos aquí. Por lo que se lee en los datos de venta, trabajan con el estándar RC-5 de Philips para control remoto.
Ver también: Prueba de laboratorio: enlace y detector de obstáculos IR |
 Se puede comprar en
Se puede comprar en 
|
|