|
pasión por la robótica en Argentina |
|
[PRINCIPAL] [ROBOTS DIDACTICOS] [NOSOTROS] [ACTIVIDAD] [NOTICIAS] [ARTICULOS] [GALERIA] [ENLACES] [CONTACTO] |
|
|
pasión por la robótica en Argentina |
|
[PRINCIPAL] [ROBOTS DIDACTICOS] [NOSOTROS] [ACTIVIDAD] [NOTICIAS] [ARTICULOS] [GALERIA] [ENLACES] [CONTACTO] |
|
Descripción y funcionamiento por Eduardo J. Carletti Información completa sobre -> Sensores para Robots Para detectar contacto físico del robot con un obstáculo se suelen utilizar interruptores que se accionan por medio de actuadores físicos. Un ejemplo muy clásico serían unos alambres elásticos que cumplen una función similar a la de las antenas de los insectos, trasladando hasta el interruptor, para accionarlo, el desplazamiento mecánico que se produce por el choque o contacto. En inglés les llaman "whiskers" (bigotes), relacionándolos con los bigotes sensibles de los animales como, por ejemplo, los perros y gatos. 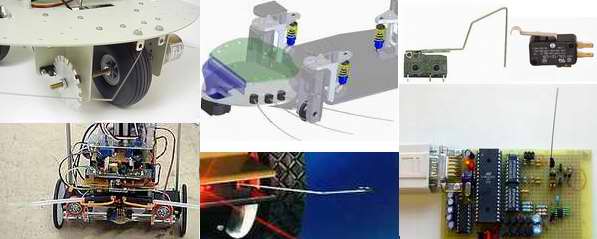 Soluciones con antenas, bigotes o "actuadores" Se pueden encontrar también bandas metálicas que rodean al robot, o sólo su frente (e incluso en la parte trasera, en algunos diseños), con una distribución similar a la de los paragolpes de los autos ("bumper", en inglés). También se utilizan contactos que se accionan al presionar sobre la "carrocería" del robot, es decir, sobre la cobertura que protege los mecanismos internos y le da el acabado exterior. El lector podrá oír hablar alguna vez de sensores "sandwich". Éstos
son construidos básicamente con dos láminas de material metálico más o menos flexible,
puestas en paralelo y separadas por un espacio libre con algún tipo de material
elástico en los bordes y en ciertas áreas interiores. El aislante es ubicado de tal modo
que se pueda aplastar fácilmente para hacer que las membranas metálicas se toquen. Al
presionar este sandwich, las placas metálicas hacen contacto y se produce la detección.
(En cierto modo, es igual al sistema que usan hoy muchos teclados de computadora.) Con estos métodos se reconoce la presencia de un objeto ubicado en la línea de recorrido de un dispositivo. Su simplicidad de construcción los hace muy empleados en robótica. Información detallada -> Sensores mecánicos de choque (parachoques) Vea también -> Sensores - Lógica de atascos |
|
|