Sensores - Piel robótica
Descripción y funcionamiento
por Eduardo J. Carletti
Información completa sobre -> Sensores para Robots
Piel robótica
El mercado ha producido, en los últimos tiempos, sensores planos, flexibles y extendidos
a los que han bautizado como "robotic skin", o piel robótica.
 Uno de estos productos es el creado por investigadores de la universidad de Tokio. Se
trata de un conjunto de sensores de presión montados sobre una superficie flexible, diseñados
con la intención de aportar a los robots una de las capacidades de nuestra piel: la
sensibilidad a la presión.
Uno de estos productos es el creado por investigadores de la universidad de Tokio. Se
trata de un conjunto de sensores de presión montados sobre una superficie flexible, diseñados
con la intención de aportar a los robots una de las capacidades de nuestra piel: la
sensibilidad a la presión.
Los sensores consisten en baratos transistores de tipo orgánico o plástico puestos sobre un material
flexible de base. De esta manera se pueden construir densos conjuntos de sensores que se
pueden extender sobre áreas amplias.
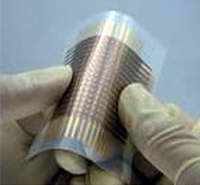
Esta piel robótica funciona aún enrollada en un cilindro de sólo 4 milímetros de diámetro.
El prototipo realizado por los investigadores japoneses es una hoja de ocho centímetros
cuadrados que contiene un conjunto de 32 por 32 sensores orgánicos, lo que significa una
densidad de 16 sensores por centímetro cuadrado. En comparación, la piel humnana tiene,
en la punta de los dedos, 1.500 sensores de presión por centímetro cuadrado. Y hay otras
zonas del cuerpo en las que tiene aún más.
El diseño de matriz activa de esta piel permite lograr, si se lo desea, que sólo se activen
sensores específicos en ciertos puntos elegidos del conjunto.
|