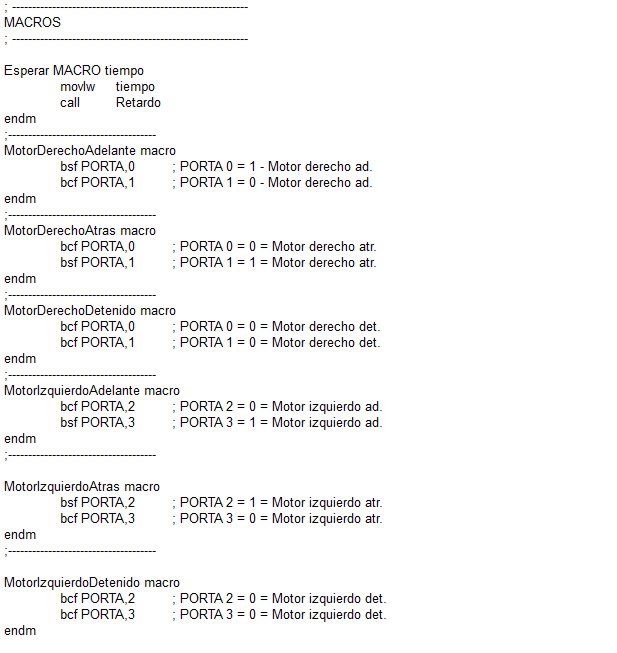
El robot programable de nuestras clases posee dos motores de corriente continua con reducciÛn a engranajes y encoder de ranuras, un circuito integrado L293D para el manejo de la corriente de los motores y un microcontrolador PIC16F876A con bootloader como centro de control. Utiliza 4 pilas recargables de 1,5V
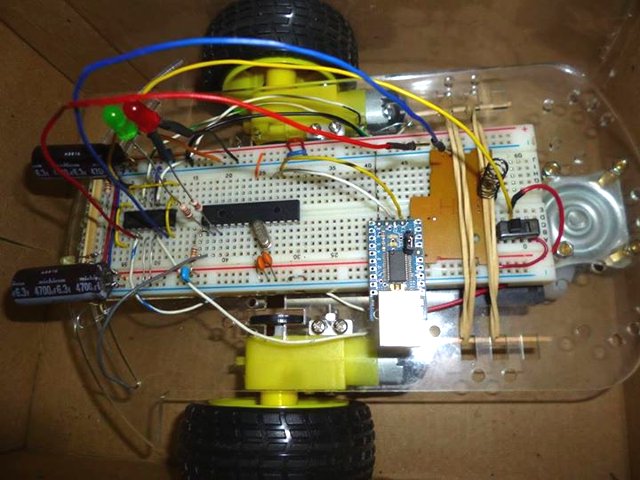
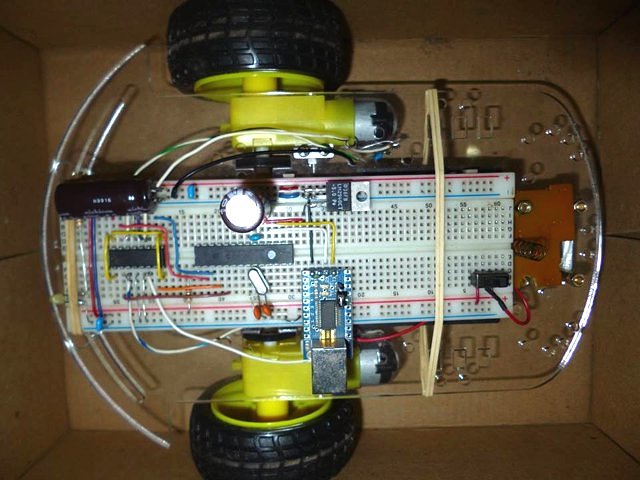
Fue construido sobre una base est·ndar comprada en China a travÈs de e-Bay, con dos motores con reducciÛn, encoder de ranura y rueda, rueda loca y portapilas. Este kit se compra en eBay por entre 10 y 17 dÛlares, dependiendo de los proveedores y de las ofertas, y con envÌo gratis. En la aduana argentina se paga un 50% sobre el valor del envÌo (yo paguÈ 5 kits a un valor de us$13 cada uno, asÌ que puestos aquÌ me costaron 13 + 6,5 = us$ 19,5 o $166 [la cotizaciÛn del dÌa que escribo esto es $8,50 por 1 dÛlar, si no se dispone de dÛlar a precio oficial, pagando con tarjeta el valor es de alrededor de $12 por dÛlar]). Si lo buscan en Mercadolibre (Argentina) lo encontrar·n a $525, o sea, un precio unas 3 veces superior.
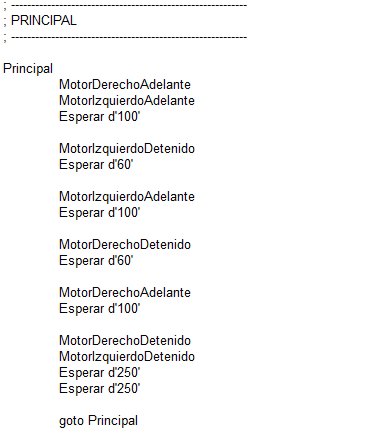
En la clase de robÛtica programamos una secuencia de movimientos en el robot con microcontrolador (el primero que es programable y no por ´reflejosª). Primero avance-giro-avance, luego avance-giro-avance-giro-avance, y por ˙ltimo varios avances y giros. Ya que a˙n no implementamos una comprobaciÛn exacta del avance de las ruedas con el encoder de ranura, debemos ajustar el tiempo del giro para lograr que el movimiento sea una L, una U, y una O.