
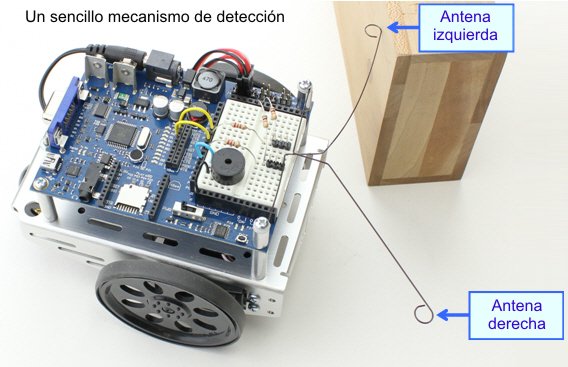
Con sensores por reflexión de infrarrojos, los robots no requieren un elemento mecánico para esquivar los obstáculos luego de chocar con ellos, como es el sistema de «antenas» o «bigotes» sensores, sino que los pueden «ver» de lejos

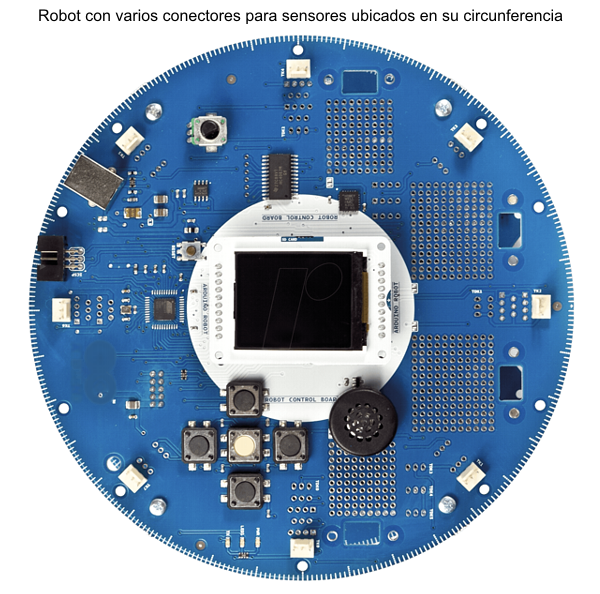
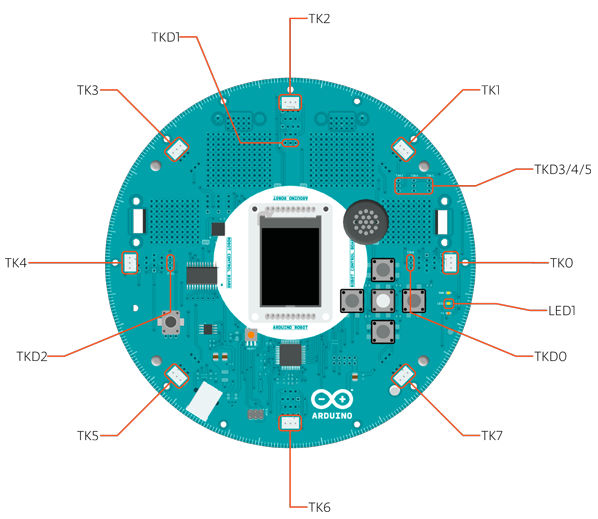
Para una sensibilidad completa, y que permite una navegación compleja del robot, se llegan a colocar tres a cinco de estos conjuntos al frente del robot, uno a cada lado, y dos o tres en la parte trasera, si bien se puede hacer un sistema funcional con un mínimo de sólo dos al frente y uno en la parte posterior.
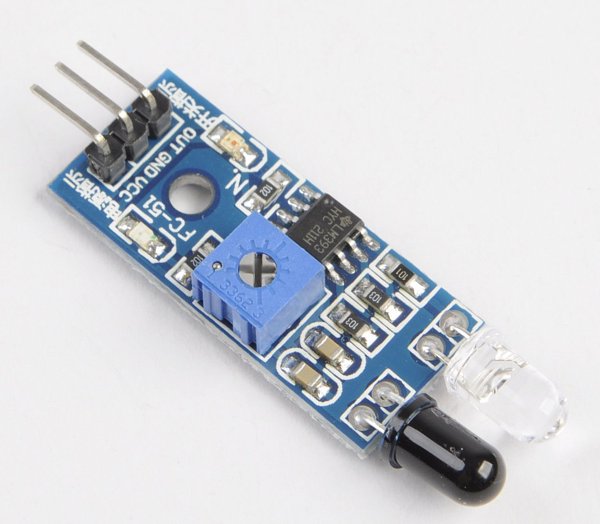
Por eso, y por el precio de los componentes en China, decidí comprar una buena cantidad. El precio en verdad es muy accesible: no llega a un total de u$s 20 los 100 juegos, mientras que los sensores ya fabricados, como el de la foto que voy a poner abajo (y que llevan apenas un soporte plástico para sostenerlos juntos, pero nada de electrónica de respaldo), los cobran aquí en Argentina, en Mercadolibre, nada menos que $150 ˇUNO SOLO! (casi 18 dólares).

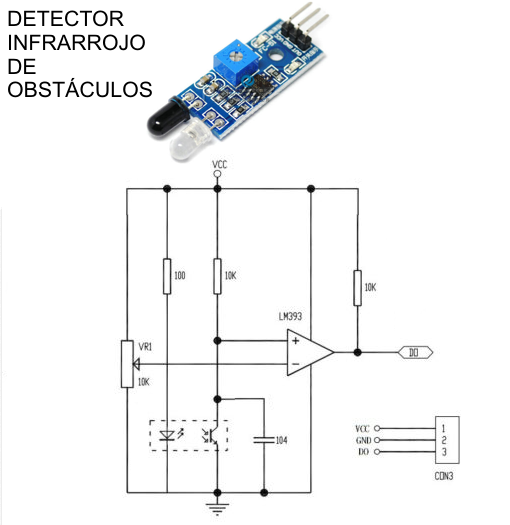
La idea de este diseńo es crear un módulo similar al que se observa en la foto de abajo, que ya posee un sencillo circuito detector, con un comparador y potenciómetro de ajuste, además de los resistores de polarización del LED y del fototransistor.
El circuito que se utiliza en este sensor no es un secreto, se puede hallar en internet con un poco de paciencia y capacidad para ajustar las búsquedas. Su diseńo (el que tienen los módulos comerciales, pero con alguna simplificación) es el que sigue:
componentes innecesarios, como un led indicador y su resistor
Espero estar mostrando en breve un módulo funcional de diseńo argentino y costo accesible. Posiblemente reemplace el potenciómetro de ajuste por resistores fijos (elegidos luego de probar la sensibilidad ajustando con un potenciómetro). Los circuitos integrados LM339 se obtienen del desarme de plaquetas recuperadas de equipos descartados, y poseen CUATRO comparadores cada uno, por lo cual posiblemente haré una plaquetita con comparadores, que servirá para cada cuatro sensores.