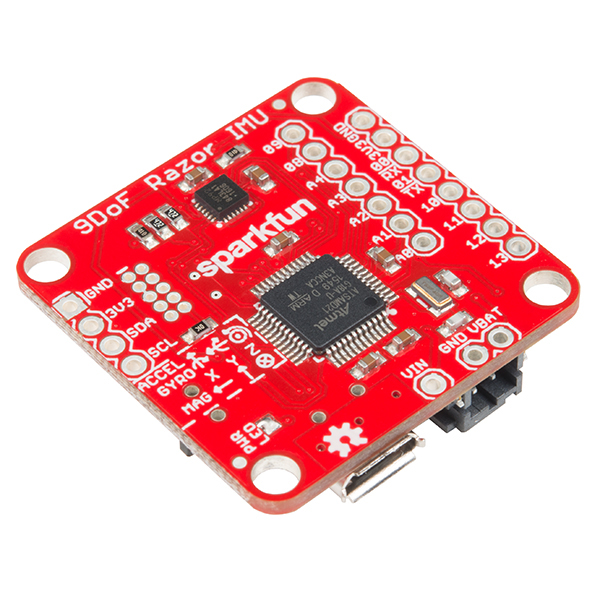
La IMU Razor M0 de 9DoF (Unidad de Medición Inercial Multipropósito: Multi-purpose Inertial Measurement Unit = IMU) combina un microprocesador SAMD21 con un sensor MPU-9250 de 9DoF (nueve grados de libertad), creando una unidad compacta y reprogramable. Se puede programar para monitorear y registrar movimiento, transmitir ángulos de Euler por un puerto serie, o incluso para funcionar como un podómetro que cuente los pasos.
Una unidad de medición inercial o IMU (del inglés inertial measurement unit), es un dispositivo electrónico que mide e informa acerca de la velocidad, orientación y fuerzas gravitacionales de un aparato, usando una combinación de acelerómetros y giróscopos. En este caso se agrega un nivel más: un magnetómetro, que permite conocer la ubicación respecto al campo magnético terrestre. Las unidades de medición inercial se usan para maniobrar aviones, incluyendo vehículos aéreos no tripulados, entre muchos otros usos, y además naves espaciales, incluyendo transbordadores, satélites y aterrizadores. La IMU es el componente principal de los sistemas de navegación inercial usados en buques y misiles guiados entre otros. En este uso, los datos recolectados por los sensores de una IMU permiten a un computador seguir la posición del aparato, usando un método conocido como navegación por estima.
El chip MPU-9250 de 9DoF de la Razor posee tres sensores cada uno de tres ejes –un acelerómetro, un giroscopio y un magnetómetro– que le dan la capacidad de detectar aceleración lineal, velocidad de rotación angular, y vectores de campo magnético.
El microprocesador que contiene –el SAMD21G18A de Atmel–, es un microcontrolador ARM de 32-bit Cortex-M0+ compatible con Arduino, que se utiliza también en los Arduino Zero y el SAMD21 de la nueva línea MKR de mini plaquetas de Arduino.
Además del par principal de circuitos integrados, la IMU Razor de 9DoF posee un zócalo para trajeta µSD, un cargador para baterías LiPo, llave de encendido y un conector de E/S para proyectos de expansión. Viene pre-programada con un firmware de ejemplo y un bootloader compatible con el IDE de Arduino, de modo que se puede modificar el firmware según las necesidades y grabarle nuevo código a través de una conexión USB.
Este artículo provee una fuente de información para comenzar, y una guía de inicio para trabajar con la IMU de SparkFun de 9DoF Razor M0. Documentaré primero las características de hardware y firmware de la plaqueta, y a continuación, mostraré cómo usar el IDE de Arduino con la biblioteca MPU-9250 de Sparkfun para Arduino para reprogramar la IMU Razor a las necesidades de nuestros proyectos.
Materiales necesarios
La IMU Razor M0 de 9DoF está provista de todo lo que se necesita para aprovechar el sensor MPU-9250 de 9DoF. Solo harán falta unos pocos elementos –la mayoría son de esos que uno ya tiene entre sus componentes– además de la plaqueta.
Se puede utilizar un cable micro-B USB para alimentar y también para reprogramar la Razor. Si usted desea tener una placa independiente para que sea móvil, va a necesitar una batería de polímero de Litio de celda única (Lithium-polymer, o LiPo), que se puede recargar conectando la Razor 9DoF en un cargador USB o en un puerto de su PC. Además, si usted necesita registrar los datos, se debe colocar una tarjetita µSD en el zócalo de la IMU Razor. Acepta µSD de cualquier tipo.
Finalmente, puede ser necesario soldar algunos conectores si se desea aprovechar las capacidades de Entrada/Salida y de alimentación de la IMU.

Lecturas sugeridas
El fabricante ha tratado de hacer que la placa sea fácil de usar independientemente del nivel de experiencia en electrónica del usuario. Sin embargo, si desea realizar una lectura previa antes de utilizar y desarrollar programas para el el 9DoF Razor IMU M0, aquí hay algunos tutoriales que ellos recomiendan (inglés):
Giroscopio
Los giroscopios miden la velocidad de rotación alrededor de un eje y son una parte esencial para determinar la orientación en el espacio.
Acelerómetro (Bases)
Una introducción rápida a los acelerómetros, cómo funcionan y por qué se utilizan.
SAMD21
Una introducción al microprocesador Atmel ATSAMD21G18 y las placas de distribución Mini y Pro R3. Mejore sus habilidades Arduino con el potente procesador ARM Cortex M0 +.
MPU-9250
Iníciese y ponga en marcha el sensor MEMS de 9 ejes MPU-9250.
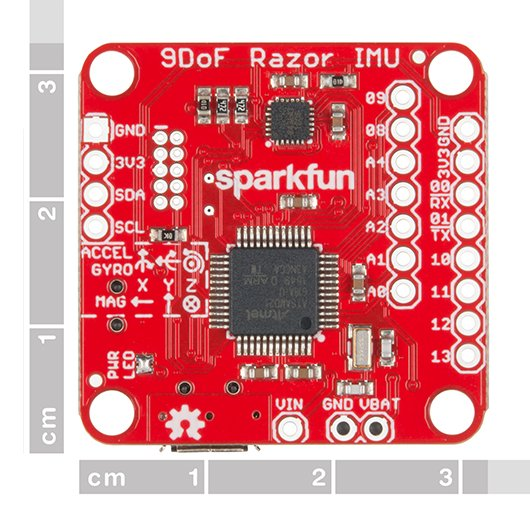
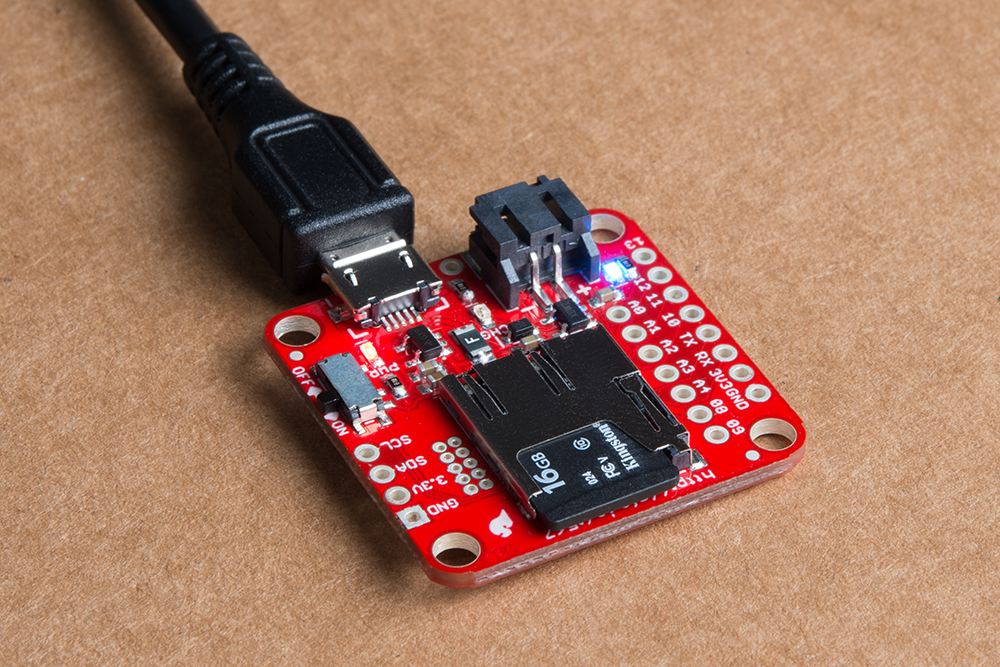
El hardware
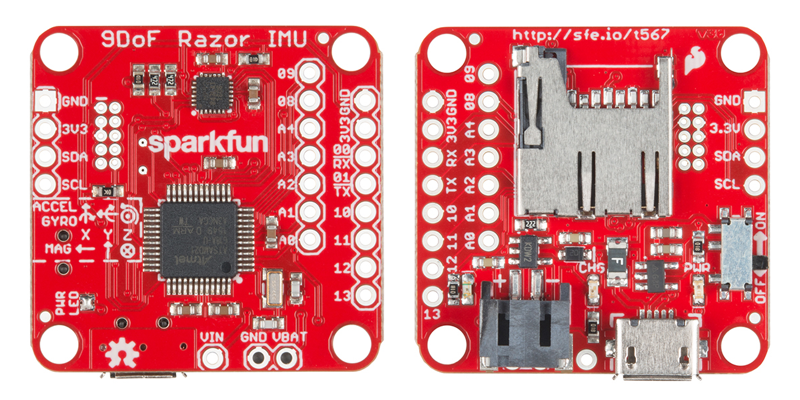
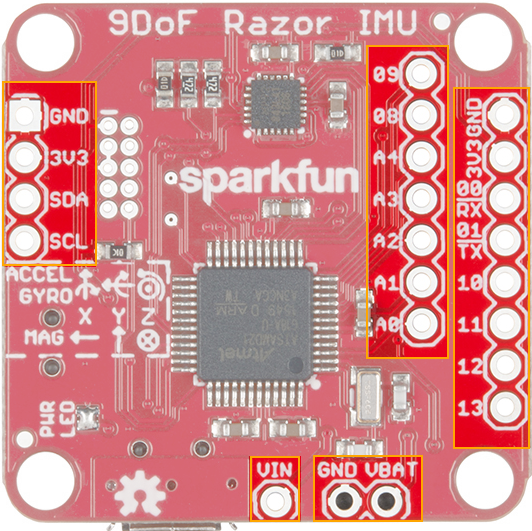
Esta placa IMU tiene montados una cantidad de componentes sobre ambas caras del circuito impreso. La imagen muestra el lado que se define como cara superior.
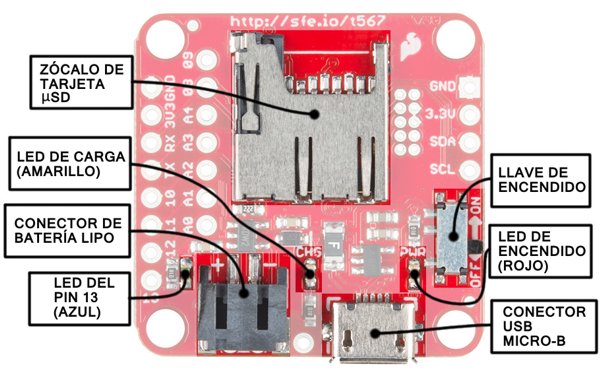
El reverso de la plaqueta posee diversos conectores, además del zócalo de la microSD, la llave de encendido y LEDs para indicar diversas funciones.
Esta IMU es un diseño de hardware abierto. Se puede descargar el diagrama esquemático (en PDF), los archivos Eagle (con el diseño del circuito impreso), y ver la historia del diseño en el reservorio GitHub de Sparkfun.
Alimentando la IMU Razor M0
Esta plaqueta está diseñada para trabajar tanto alimentada desde el cable USB, o con una batería LiPo en el conector adecuado. Sólo hay que asegurarse de que la batería sea de celda simple, con un voltaje nominal de 3,7V a 4,2V.
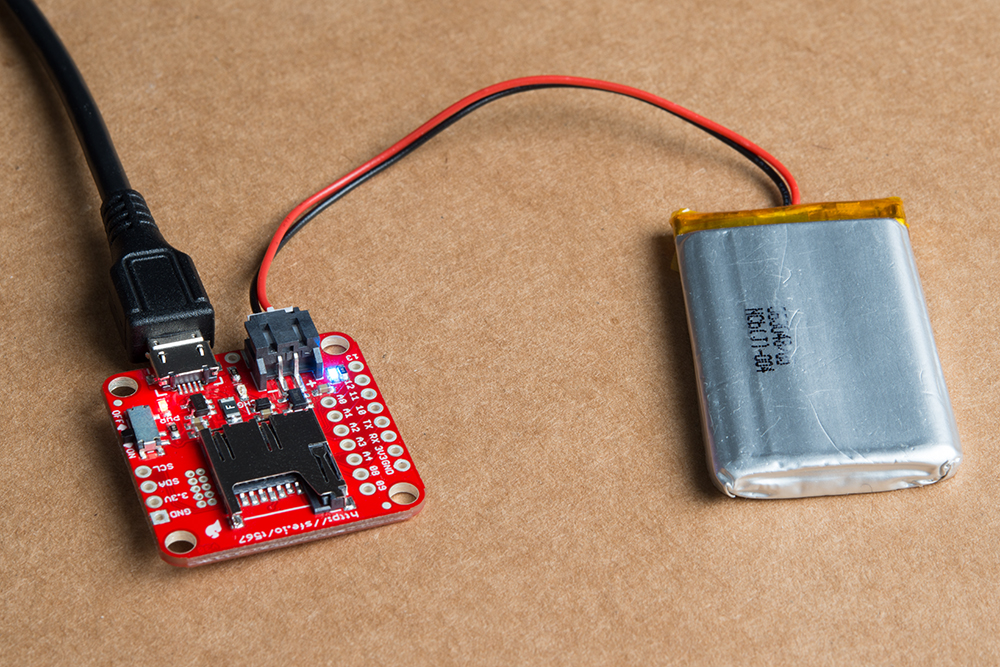
Conecte tanto el USB como una LiPo para cargar la batería
Si se conectan ambos, el USB y la batería LiPo en la plaqueta, ésta se cargará con una corriente de hasta 450 mA. El estado de la carga lo indica el led amarillo de carga, que se apaga cuando la batería queda cargada a pleno.
Corriente de carga 450mA: La corriente máxima de carga está fijada por un resistor externo y no es modificable, al menos no con facilidad. La práctica nos dice que no es seguro cargar una batería LiPo con una corriente mayor a sus mA/h, lo que significa que no se recomienta utilizar baterías LiPo con capacidades menores a 450mAh para esta plaqueta.
Sea alimentada desde la fuente de USB, o con la batería LiPo, el voltaje es regulado a 3,3 V y se utiliza para alimentar tanto el SAMD21 como el MPU-9250. El regulador tiene una capacidad de aproximadamente 600 mA, lo que significa que debería tener suficiente resto para entregar corriente. Si lo desea puede alimentar otros dispositivos desde los pines marcados con 3V3.
Los pines VIN, VBAT y GND se pueden usar para alimentar el regulador de 3,3V de la IMU Razor en lugar de utilizar las entradas USB o el conector para la LiPo (JST). El voltaje en el pin VIN no debe exceder los 6V, y el pin VBAT solo debe conectarse a una batería LiPo de una celda.
Finalmente, el interruptor de ENCENDIDO/APAGADO en la parte inferior de la placa controla la alimentación entre ambas fuentes de entrada y el resto de los componentes de la placa. Mientras está en la posición «OFF» (Apagado), la batería LiPo seguirá en carga, pero no se debe aportar energía a ningún otro componente.
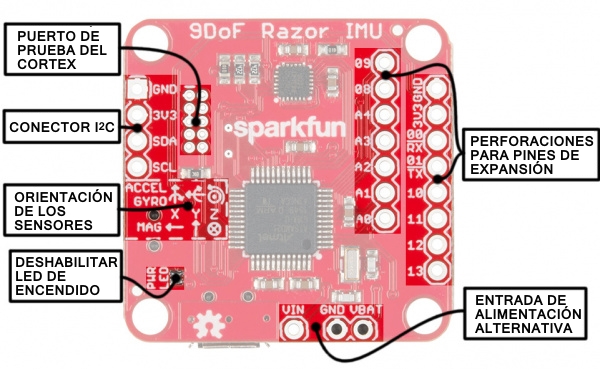
Perforaciones de pines para el SAMD21 y la alimentación
La placa tiene perforaciones preparadas para soldar conectores con tantos pines de Entrada/Salida del microcontrolador SAMD21 como se pudieron acomodar en el pequeño tamaño de la IMU Razor. Eso incluye los pines 08-13, las entradas del convertidor analógico a digital A0-A4, RX, TX, y los pines I2C, SDA y SCL.
Los pines SDA y SCL están en el mismo bus I2C que el MPU-9250, pero eso no debería ser un problema siempre que los dispositivos I2C adicionales no compartan las direcciones de 7 bits de la IMU (0x68 y 0x0C).
Usted puede soldar conectores hembra como los que tienen los Arduinos UNO y Mega, o hileras de pines macho, o directamente cablear a esos puntos de soldadura para expandir las funciones de la plaqueta. Por ejemplo, usted puede conectar un sensor BME280 directamente en el puerto I2C, y agregar detección de altitud y temperatura a su IMU.
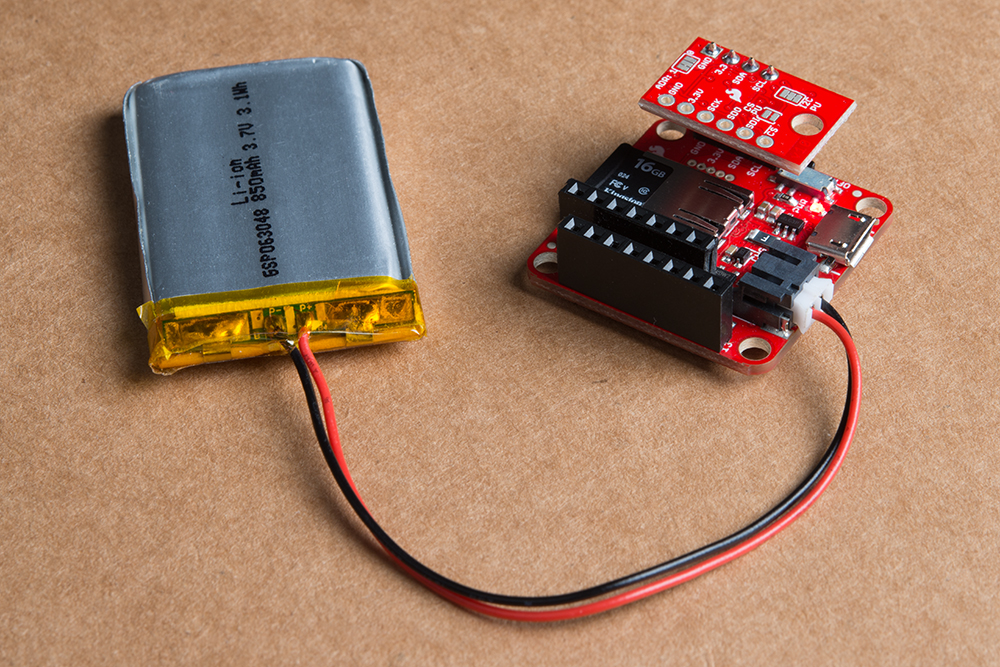
Algunos módulos de la misma marca basados en I2C utilizan la misma
distribución de 4 pines, así que se pueden conectar directamente
El puerto de depuración single-wire =
SWD (de un solo cable) del SAMD21 también está perforado en la parte superior de la placa, en caso de que se quiera programar el chip con un depurador
JTAG. El pinout de este puerto coincide con el
estándar del conector de depuración Cortex de 10 pines. Una «muesca» blanca indica el pin 1 de este puerto.
MPU-9250 Orientación de Acelerómetro / Giroscopio / Magnetómetro
La orientación del acelerómetro, el giroscopio y los ejes X, Y y Z del magnetómetro es determinada por la posición del MPU-9250. Para facilitar la referencia, estos vectores se han documentado con una impresión en la parte superior de la placa.
Tenga en cuenta que los ejes X e Y del magnetómetro están invertidos respecto a los del acelerómetro y el giroscopio, y que el eje Z también está invertido.
Trabajando con el firmware de ejemplo
Además de un gestor de arranque de Arduino (bootloader), el IMU también tiene cargado un ejemplo de firmware que es suficiente para demostrar, al menos, que funciona el seguimiento de movimiento del sensor, e incluso hacer un pequeño registro en una tarjeta µSD. Para comenzar a usar el firmware de ejemplo, simplemente conecte la IMU a una computadora.
Después de conectar la placa, debe aparecer como un puerto serie. En Windows, aparece como COMx y en Mac, debería verse como /dev/tty.usbserial-ABCD12.
Instalación del controlador
Usuarios de Windows 10: la primera vez que conecte el IMU Razor a su computadora, es posible que deba instalar controladores para habilitar el perfil USB de la clase de dispositivo de comunicación (CDC) de la placa.
Si su placa no aparece como un puerto COM, haga clic en el botón de abajo para descargar los controladores.
DESCARGAR DRIVERS DE WINDOWS PARA SAMD21
Para obtener ayuda para instalar los controladores, consulte las instrucciones del fabricante en la guía de conexión de Breakout SAMD21.
Después de ubicar el puerto de la placa, abra el Terminal Serie y establezca la velocidad en baudios a 115200 bps. El Monitor Serie del Arduino funciona bien para este propósito, o puede descargar alguno diferente desde aquí: programas de terminal.
Al abrir el puerto, el IMU Razor 9DoF debe comenzar inmediatamente a enviar las lecturas del acelerómetro, el giroscopio y el magnetómetro.
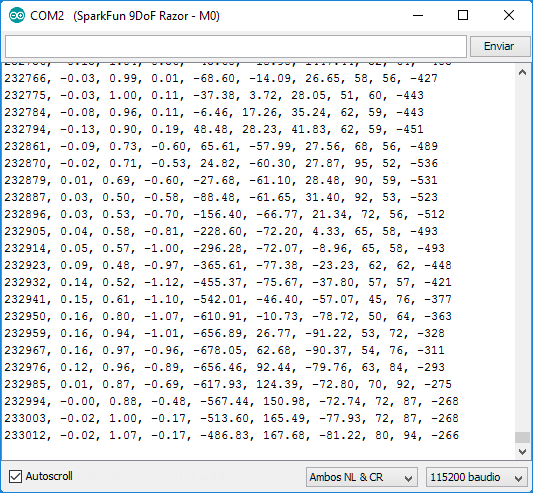
El formato estándar de la línea de texto es:
<timeMS>, <accelX>, <accelY>, <accelZ>, <gyroX>, <gyroY>, <gyroZ>, <magX>, <magY>, <magZ>
Esta línea se puede modificar enviando cualquiera de los siguientes comandos:
- ESPACIADOR – Pausa/reinicio de impresión de puerto serie
- t – Habilitar/deshabilitar las lecturas de tiempo
- a – Habilitar/deshabilitar las lecturas del acelerómetro
- g – Habilitar/deshabilitar las lecturas del giróscopo
- m – Habilitar/deshabilitar las lecturas del magnetómetro
- c – Alternar entre valores calculados o sin procesar de las lecturas
- q – Habilitar/deshabilitar lecturas cuaternianas (qw, qx, qy y qz se muestran luego de las lecturas magnéticas)
- e – Habilitar/deshabilitar cálculos Euler de ángulo (pitch, roll, yaw) (se muestran luego del procesamiento cuaterniano)
- h – Habilitar/deshabililar las lecturas de encabezado
- r – Ajustar el ritmo de registro en incrementos de 10Hz entre 1-100Hz (1, 10, 20, … 100)
- A – Ajustar el rango de escala máxima del acelerómetro. Cicla entre ± 2, 4, 8, and 16 g.
- G – Ajustar el rango de escala máxima del giroscopio. Cicla entre ± 250, 500, 1000, 2000 dps.
- s – Habilitar/deshabililar el registro en tarjeta SD
Todas las configuraciones se almacenan en una memoria no volátil, por lo que al iniciar su IMU Razor 9DoF deberá tener la misma información con que la configuró anteriormente.
Además de iniciar sesión en su puerto serie, el firmware también está diseñado para registrar los datos en una tarjeta µSD, si hay una presente. Coloque una y debería tener los archivos de registro de IMU la próxima vez que conecte la tarjeta SD a su lector.
El firmware del 9DoF Razor IMU está disponible en el repositorio GitHub del producto. Para cargar el firmware, necesitará las definiciones de la placa SparkFun SAMD21 y la biblioteca SparkFun MPU-9250 DMP Arduino instalada en su máquina. Que es exactamente lo que vamos a documentar a continuación…
El IMU Razor 9DoF M0 está diseñado en base al SAMD21, el mismo procesador del Arduino Zero, lo que significa que agregar el soporte de Arduino para la placa está a solo unos clics. Esta sección describe los pasos que deberá seguir para instalar los núcleos SAMD en su biblioteca Arduino (eso suena más atemorizante de lo que realmente es).
¡Actualizar Arduino! Esta configuración requiere al menos la versión 1.6.4 o posterior e Arduino. Lo he probado en 1.8.8 y recomendaría esa versión del IDE o superior. Si está ejecutando una versión anterior de Arduino, visite arduino.cc para obtener la última y mejor versión.
Instale las placas de Arduino SAMD
Primero, deberá instalar una variedad de herramientas, que incluyen bibliotecas ARM Cortex de bajo nivel llenas de código genérico, arm-gcc para compilar su código y bossa para cargar código a través del bootloader. Estas herramientas vienen empaquetadas junto con las definiciones de la placa SAMD de Arduino para el Arduino Zero.
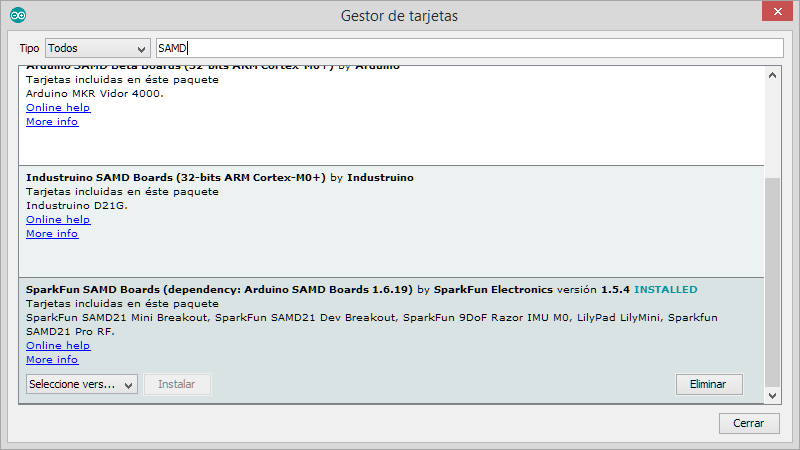
Para instalar las definiciones de la placa Arduino SAMD, vaya a su administrador de la placa ( Herramientas > Placa > Gestor de tarjetas … ), luego busque una entrada “Arduino SAMD Boards (32-bits ARM Cortex-M0+)”. Selecciónela e instale la última versión (actualizada recientemente a 1.6.20).
La descarga e instalación de las herramientas puede demorar un par de minutos; en particular, arm-gcc llevará más tiempo, se trata de 250 MB sin comprimir.
Una vez instalado, el texto azul «INSTALLED» debe aparecer dentro de la entrada de la lista de placas SAMD.
Instalar la definición de la placa SparkFun
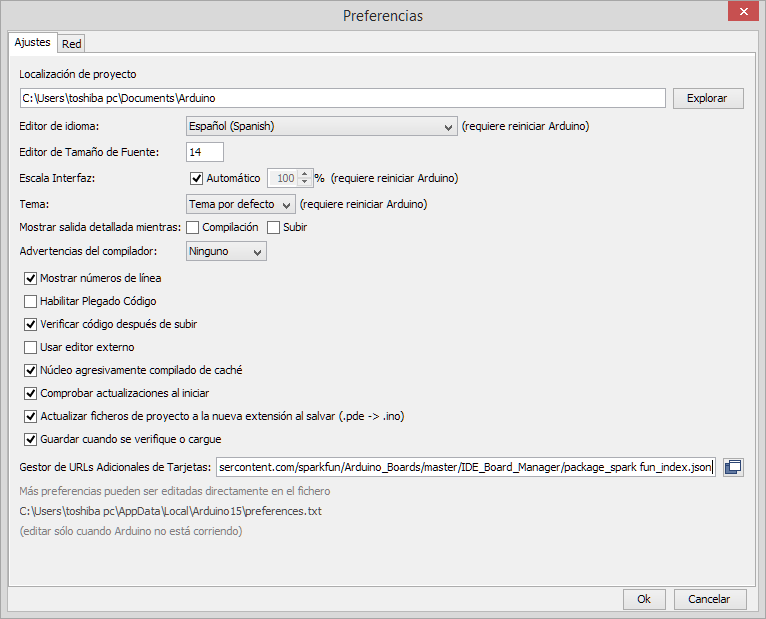
Ahora que sus herramientas ARM están instaladas, se requiere un último paso de configuración para agregar soporte para las placas SparkFun SAMD. Primero, abra sus preferencias de Arduino ( Archivo > Preferencias ). A continuación, busque el cuadro de texto Gestor de URLs adicionales de Tarjetas y pegue allí el siguiente enlace:
https://raw.githubusercontent.com/sparkfun/Arduino_Boards/master/IDE_Board_Manager/package_spark fun_index.json
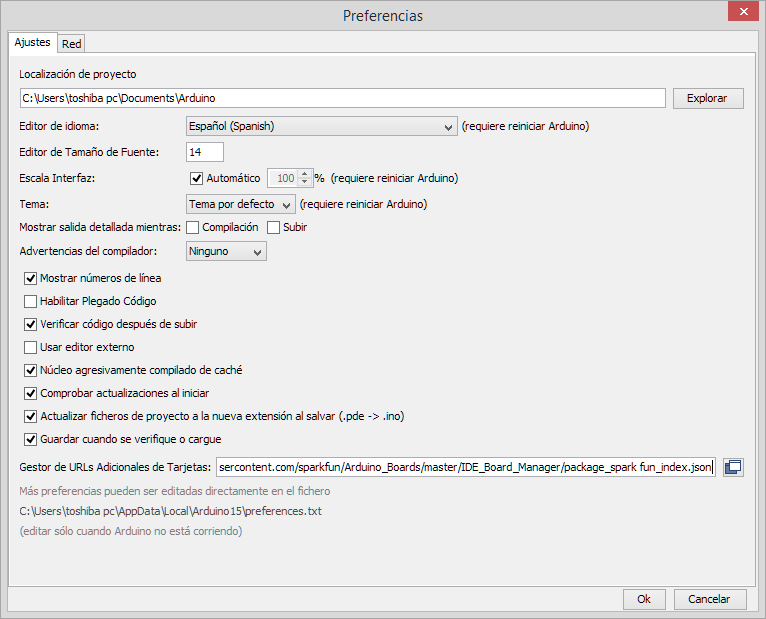
Luego presione «OK«, y regrese al menú del Gestor de tarjetas. Debería encontrar una nueva entrada para las placas SAMD de SparkFun.
Esta instalación debería ser mucho más rápida; el trabajo pesado fue realizado en la sección anterior.
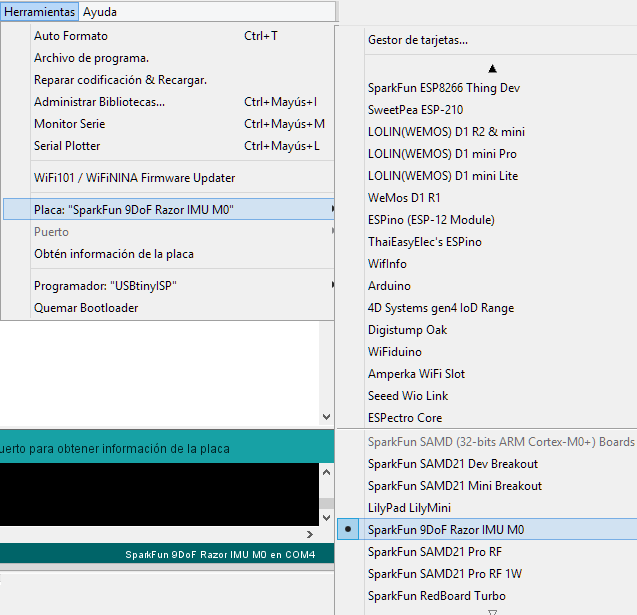
Seleccione la placa y el puerto serie
Una vez que se haya instalado la placa, debería ver algunas entradas nuevas en la lista Herramientas > Placa, incluida la Razor IMU M0 de SparkFun 9Do, en el menú «Placas SparkFun SAMD (ARM Cortex-M0 +) de 32 bits». Y finalmente, seleccione el puerto del IMI 9DoF Razor yendo al menú Herramientas > Puerto.
La plaqueta ya funcionará con el programa de ejemplo. En un próximo artículo cargaremos este programa de ejemplo, para comprobar el funcionamiento del bootloader, y podremos comenzar a realizar pruebas, cambiando el programa a gusto y escribir nuevos programas a medida de nuestro propio proyecto de detección de movimientos.
[ Continúa en la parte 2 ]








Artículos Relacionados: