
Los músculos neumáticos son un tipo de dispositivo relativamente nuevo que produce un movimiento lineal utilizando aire a presión, pero no utiliza pistones como los actuadores neumáticos e hidráulicos habituales. Se contrae cuando se lo activa, como los músculos biológicos.

Estos músculos son fáciles de usar, no son muy costosos, y según quienes los fabrican, para ciertos usos (como por ejemplo en miembros manipuladores de robots) son más eficaces que los cilindros neumáticos estándar.

Demostración: al contraerse, un músculo neumático de 30 mm puede doblar un grueso clavo de hierro;
Haciendo algún tipo de comparación, en cierto modo los músculos neumáticos son similares a los alambres de nitinol, más que nada por su capacidad de contraerse cuando se los activa.
Una comparación rápida entre las dos opciones da estos resultados:
El alambre de nitinol sólo se contrae 5 a 7% de su longitud. El músculo neumático se contrae normalmente un 25% de su longitud, y puede llegar a un 40%. El alambre de nitinol consume mucha energía eléctrica y genera calor que se debe hacer disipar de algún modo.
Aunque el tiempo de reacción de un músculo de alambre puede ser rápido, su tiempo de ciclo (calefacción-enfriamiento-calefacción) suele ser muy largo. El músculo neumático funciona con aire comprimido. Aún cuando se consume energía eléctrica para comprimir el aire, este aire comprimido se puede almacenar. La respuesta de los músculos neumáticos es rápida y el ciclo es veloz.
Hacer una comparación de fuerza y del consumo total de energía es difícil. Un músculo neumático pequeño puede levantar 3 kg, mucho más que un alambre estándar de nitinol. El alambre de nitinol es más delicado, pero solamente cuando los diámetros de estos alambres son pequeños. Un alambre grueso de nitinol —no se fabrican muy gruesos porque serían muy costosos— tendría una fuerza de contracción de centenares de kilogramos (incluso millares), aunque consumiría una enormidad de corriente eléctrica.

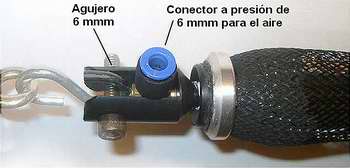
El músculo neumático es un tubo alargado construido con una malla de plástico negro. Dentro de él hay un tubo de goma blanda. En los extremos posee unos clips de metal que lo cierran. La red plástica toma forma de lazos en cada extremo, que se sujetan con los clips del metal. Los lazos se utilizan para fijar el músculo neumático a un dispositivo. En los tamaños mayores, los fabricantes utilizan uniones sólidas en lugar de los lazos.
Cuando se presuriza un músculo neumático, la cámara de goma se infla. La cámara presiona contra la red de sujeción de plástico negro, que también se extiende. Al aumentar el grosor de la red plástica, su longitud se acorta. Esto causa que la longitud total del músculo neumático se reduzca, produciendo la contracción.
| Figura | Diámetro de la cobertura trenzada | Longitud | Tamaño de la conexión de aire | Fuerza de tracción con 3,5 bar de presión | Fuerza máxima de tracción |
|---|---|---|---|---|---|

| 6 mm | 150 mm (estirado) | 4 mm | 3 kg | 7 kg |

| 20 mm | 210 mm (estirado) | 4 mm | 12 kg | 20 kg |

| 30 mm | 290 mm (estirado) | 6 mm | 35 kg | 70 kg |


Una aplicación bien sofisticada y exigente de estos músculos es una mano robótica que fabrican los mismos que producen estos actuadores (Shadow Robot Company), la mano Shadow Dextrous. Este miembro para robots es manejado por 36 músculos neumáticos.

Más datos:
Air Muscles
Cómo fabricar su propio músculo neumático (inglés)