Mi robot «Curcu e1701» (me pidieron que le pusiera un nombre, y bueno, este salió… es raro pero claro que tiene sentido para mí) representó a la Argentina en la Campus Party Iberoamérica 2008, que se realizó durante la XVIII Cumbre Iberoamericana en Octubre de 2008 en El Salvador, con la presencia de los presidentes Cristina Fernandez de Kirchner, Elías Antonio Saca González (El Salvador), Albert Pintat Santolària (Andorra), Evo Morales (Bolivia), Luis Ignacio Lula Da Silva (Brasil), Michelle Bachelet (Chile), Álvaro Uribe Vélez (Colombia), Oscar Arias (Costa Rica), Carlos Lage Dávila (Cuba, Vicepresidente), Leonel Fernández (República Dominicana), Rafael Correa (Ecuador), Juan Carlos I (España, Rey y Jefe de Estado), José Luis Rodríguez Zapatero (España, Presidente), Álvaro Colom (Guatemala) y otros
Trabajando con un colega de Argentina, Arístides Álvarez, a quien invité a acompañarme (los organizadores contactaron conmigo primero, y me dijeron que podía invitar a un colega argentino). Me alegro mucho de haberlo elegido a él, porque disfrutó de este viaje: en verdad fue una aventura muy interesante para los dos. Muy buen tipo, Arístides; vivía en Mar del Plata. Sólo lo conocía por Internet y me había regalado cosas que él traía de EEUU para vender aquí sólo por simpatía con mi actividad en robótica, y porque a mí me resultaba muy bueno el mismo chip microcontrolador que él defendía todo el tiempo, el Propeller. Lamentablemente, un tiempo después de nuestro regreso, falleció… Trabajando con Arístides Álvarez, un colega de Argentina que viajó conmigo. Preparábamos el robot que representaba a Argentina en la experiencia colaborativa de el grupo de robótica, los que formaron, cambiando de color, todas las banderas de los países participantes.
Trabajando con Arístides Álvarez, un colega de Argentina que viajó conmigo. Preparábamos el robot que representaba a Argentina en la experiencia colaborativa de el grupo de robótica, los que formaron, cambiando de color, todas las banderas de los países participantes. Las mesas de trabajo del área de Robótica
Las mesas de trabajo del área de Robótica Carletti al rojo vivo
Carletti al rojo vivo
Mi robot insecto, en exposición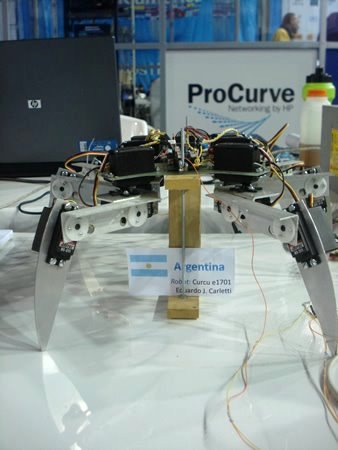 El robot en la mesa de trabajo, donde debía concluir los trabajos de programación motriz
El robot en la mesa de trabajo, donde debía concluir los trabajos de programación motriz Instalando el robot en la mesa de trabajo, sostenido en un «arnés», para que no se «escapase»
Instalando el robot en la mesa de trabajo, sostenido en un «arnés», para que no se «escapase»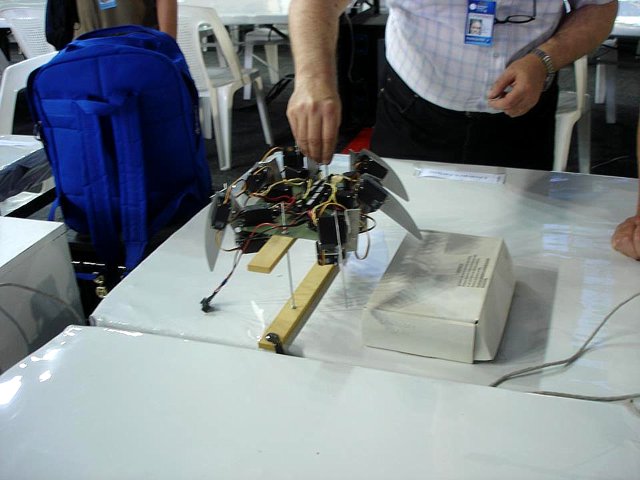 Sigue leyendo →
Sigue leyendo →
