
por Eduardo J. Carletti
[Información completa sobre -> Sensores para Robots]
Introducción
En este artículo voy a presentar las pruebas básicas de laboratorio que realicé con un sensor de fuerza FlexiForce de la empresa Tekscan.
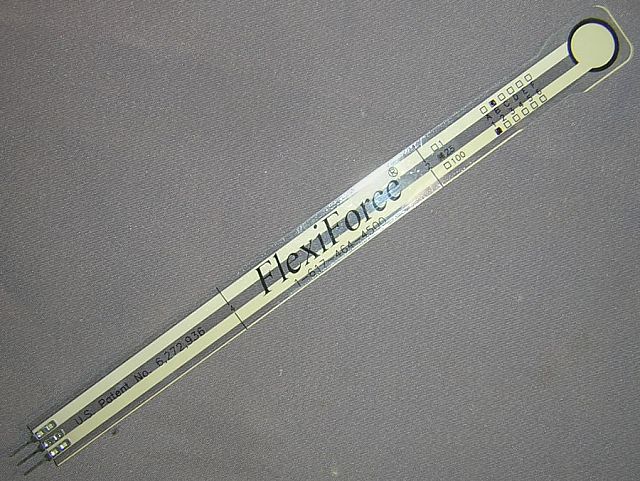
Como se puede observar en las fotos, se trata de un sensor integrado dentro de una membrana de circuito impreso flexible de escaso espesor. El sensor es totalmente plano, lo cual permite colocarlo con facilidad entre dos piezas de la mecánica de nuestro sistema y medir la fuerza que se aplica sin perturbar la dinámica de las pruebas.

Como indica su hoja de datos, estos sensores se pueden utilizar para medir tanto fuerzas estáticas como dinámicas. En esta línea hay sensores que pueden soportar hasta 453 kgf (ó 1.000 lbf).
Los sensores FlexiForce utilizan una tecnología basada en la variación de resistencia eléctrica del área detectora. La aplicación de una fuerza al área activa de detección del sensor se traduce en un cambio en la resistencia eléctrica del elemento sensor en función inversamente proporcional a la fuerza aplicada.
Datos físicos
El modelo de sensor que pondré a prueba aquí es el A201-25, que tiene un rango de sensibilidad de 0 a 11 kgf (0 a 25 lbf). La longitud de los conductores de este sensor (integrados también como circuito impreso flexible) es de 16 cm, incluyendo el círculo sensor y las patitas de conexión. El ancho en la zona de los conductores es de 10 mm y en la zona sensible es de 15 mm. El espesor es de 0,127 mm.
La zona de detección activa es un círculo colocado en un extremo del sensor que tiene 9,53 mm de diámetro.
El sensor A201-25
El sensor está sostenido entre dos capas de película de poliéster. En la parte interna de cada una de estas capas hay una película de material conductor (plata) y dentro éstas una capa de «tinta» —así define el fabricante a este material— sensible a la presión. Todo el conjunto está unido por medio de un adhesivo.
El sensor actúa como resistencia variable en un circuito eléctrico. Cuando el sensor no tiene fuerza aplicada, su resistencia es muy alta (superior a 5 megohm), y cuando se aplica una fuerza al sensor, la resistencia disminuye.
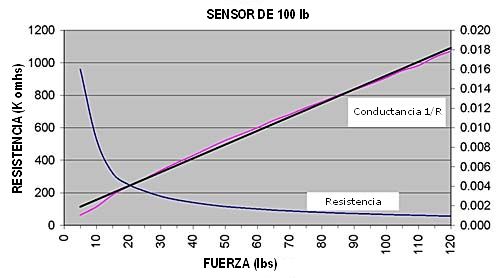
Curva de resistencia (para 100 lb)
Pruebas básicas
Como se puede observar en la foto, la prueba se realizó utilizando un multímetro. Probando escalas, se encontró que aún en la escala máxima de resistencia (0-20 Megohms), el sensor, sin fuerza aplicada, indica un circuito abierto.
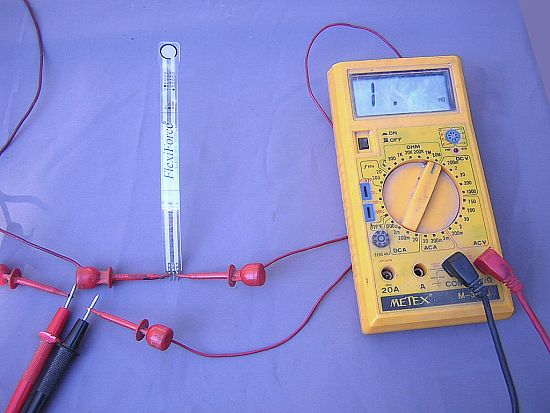
El sistema, sin ninguna fuerza aplicada, indica resistencia infinita
Aplicando presión con los dedos, se obtienen distintos valores de resistencia, en disminución a medida que se va ejerciendo más y más fuerza.
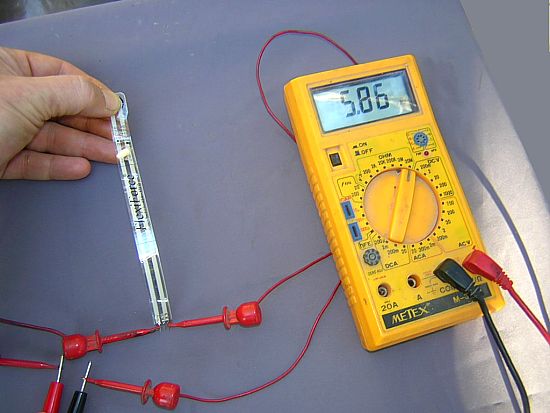
La medición indica 5,86 Megomhs
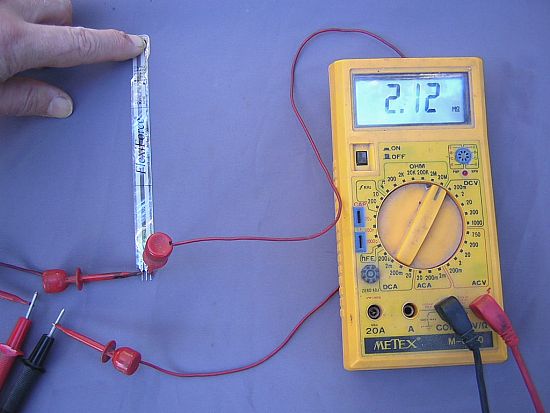
La medición indica 2,12 Megomhs
Estos sensores son perfectos para medir la presión de los dedos sobre el objeto manipulado por una mano robótica, de modo que hice las siguientes pruebas.

Levantando un frasco de mermelada que pesa 700 gs.
Con el sensor debajo del pulgar, indicó 5 Megohms

Levantando un frasco de aceitunas que pesa 1200 gs.
Con el sensor debajo del pulgar, indicó 1,8 Megohms.
Por último, colocando el sensor entre dos chapas, con un peso estático de 1,25 Kg se obtuvo una medición de 3 Megohms (aclaro que depende mucho de que se pueda centrar bien el peso sobre el lugar en que está el sensor, con poco desplazamiento, esta medición puede variar bastante).
Enlaces: