Crean un nuevo tipo de robot compuesto de muchas partículas simples sin ningún control centralizado o punto único de fallo

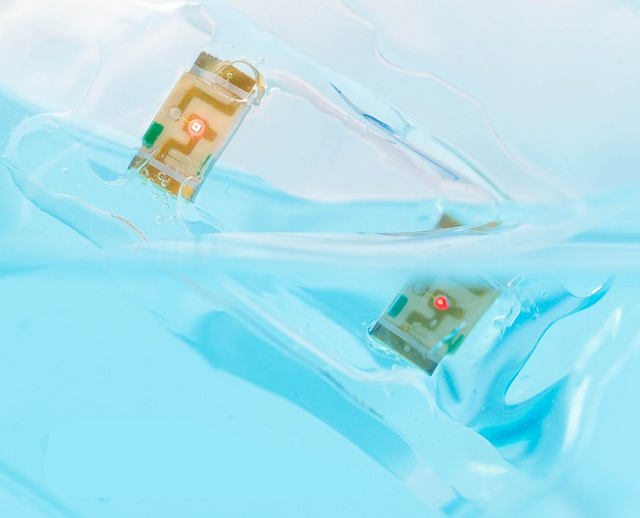
Los robots partícula están compuestos de componentes débilmente acoplados, o partículas, que carecen de una identidad individual o posición direccionable. Sólo son capaces de un simple movimiento: expansión y contracción. Sin embargo, cuando un grupo de partículas es coordinado para moverse como un colectivo, se observa un interesante comportamiento. Incluso en configuraciones amorfas, los robots de partículas explotan los fenómenos mecánicos estadísticos para producir la locomoción.
Crédito: Shuguang Li/Ingeniería De Columbia
Los robots actuales son, generalmente, entidades auto-contenidas hechas en base a la interdependencia de sus subcomponentes, cada uno con una función específica. Si una parte falla, el robot deja de funcionar. En la robótica de enjambres, cada robot es una máquina que funciona de manera independiente.
En un nuevo estudio publicado la semana pasada en Nature, los investigadores en Ingeniería de Columbia y el MIT de Ciencias de la computación y el Laboratorio de Inteligencia Artificial (CSAIL) demuestran por primera vez la manera de hacer un robot compuesto de muchos componentes débilmente acoplados, o «partículas». A diferencia de los enjambres o los robots modulares, cada componente es simple, y no tiene una identificación o identidad individual. En su sistema, lo que los investigadores llaman «el robot de partículas», cada partícula sólo puede realizar oscilaciones volumétricas uniformes (leves expansiones y contracciones), pero no se puede mover en forma independiente.
El equipo, liderado por Hod Lipson, profesor de ingeniería mecánica en Ingeniería de Columbia, y la directora del CSAIL, Daniela Rus, descubrió que al agrupar miles de estas partículas juntas en un conjunto “viscoso” y hacerlo oscilar en reacción a una fuente de luz, cada robot partícula lentamente comenzó a moverse hacia adelante, hacia la luz.
«Usted puede pensar en nuestro nuevo robot como la proverbial «Gray Goo«, dice Lipson. «Nuestro robot no tiene ningún punto único de fallo y no hay un control centralizado. Todavía es bastante primitivo, pero ahora sabemos que este paradigma fundamental de la robótica es realmente posible. Pensamos que incluso puede explicar cómo se pueden mover juntas las células en grupos, aunque las células individuales no pueden hacerlo.»
Los investigadores han estado construyendo robots autónomos durante más de un siglo, pero estos han sido máquinas no biológicas que no pueden crecer, sanar, o recuperarse de los daños. El equipo de Ingeniería de Columbia/MIT se ha centrado en el desarrollo de robots duraderos y escalables que pueden funcionar incluso cuando fallan componentes individuales.
El concepto de «gray goo» (plaga gris), un robot compuesto de miles de millones de nanopartículas, ha fascinado a los fans de la ciencia ficción durante décadas. Pero la mayoría de los investigadores la han descartado como una teoría descabellada.
«Hemos estado tratando de repensar de manera fundamental nuestro enfoque de la robótica, para descubrir si hay una manera de crear robots de manera diferente», dice Lipson, quien dirige el Laboratorio de Máquinas Creativas. «No sólo hacer que un robot tenga aspecto de criatura biológica sino, en realidad, construirlo como un sistema biológico, creando algo de gran complejidad y habilidades, y sin embargo compuesto de simples partes fundamentales.»
Rus, que es también Profesor de Ingeniería Eléctrica y Ciencias de la computación en el MIT, añade, «Todas las criaturas en la naturaleza son [constituidos por] células que se combinan de diferentes maneras para formar los organismos. En el desarrollo de los robots de partículas, la pregunta que nos hacemos es, ¿podemos tener células robóticas que se pueden componer de diferentes maneras para formar diferentes robots? El robot podría tener la mejor forma requerida por la tarea que debe realizar: una serpiente para arrastrarse a través de un túnel, o una máquina con tres manipuladores para la planta de una fábrica. Incluso podríamos dar a estos robots de partículas la capacidad de darse forma ellos mismos”. Supongamos, por ejemplo, que un robot necesita un destornillador de su mesa de trabajo, y su controlador de tornillos está demasiado lejos para alcanzarlo. ¿Qué pasa si el robot pudiese intercambiar sus células para desarrollar un brazo? Cuando cambian sus metas, su cuerpo puede cambiar también.
El equipo, trabajando con Chuck Hoberman en Harvard Wyss Institute y otros investigadores de la Cornell, utiliza muchos componentes idénticos, o partículas, que pueden realizar un simple movimiento como expandirse y contraerse. En las simulaciones, hicieron demostraciones con robots compuestos de 100.000 partículas. Experimentalmente, han demostrado un sistema compuesto de dos docenas de partículas.
«Las partículas más cerca de la fuente de luz experimentan una luz más brillante y por lo tanto inician primero su ciclo «, explica Shuguang Li, primer co-autor del artículo que llevó a cabo los experimentos físicos. Li, que fue becario postdoctoral en Lipson, su laboratorio original de Cornell, y está en la actualidad en una estancia posdoctoral con Rus en CSAIL, continúa. «Ese movimiento crea una especie de ola en todo el conjunto, desde los que están más cerca de la luz a los más alejados, y la ola hace que todo el conjunto avance hacia la luz. El movimiento hacia la luz produce un movimiento global, aunque las partículas individuales no se pueden mover de forma independiente».
Modelando este comportamiento en las simulaciones, se ha probado hacer que eviten obstáculos y transportar objetos a mayores escalas, con cientos y miles de partículas. También fueron capaces de demostrar la capacidad de adaptación del paradigma de robot de partículas tanto ante componentes ruidosos como con fallas individuales.
«Hemos encontrado que nuestro robot de partículas mantiene aproximadamente la mitad de su velocidad a funcionamiento pleno, aún cuando el 20 por ciento de las partículas están muertas», dice Richa Batra, primer co-autor del artículo y estudiante de Doctorado de Lipson que dirigió el estudio de simulación.
El equipo ya está probando su sistema con una mayor cantidad de partículas por centímetro. Asimismo, se están explorando otras formas los robots de partícula, tales como microesferas vibrando.
«Creemos que algún día será posible hacer estos tipos de robots de millones de partículas diminutas, como microesferas que responden al sonido o la luz o el gradiente químico», dice Lipson. «Los robots podrían ser utilizados para hacer cosas como limpiar áreas o explorar terrenos o estructuras desconocidas.»
________________________________________
Fuente:
Materiales proporcionados por la Universidad de Columbia, Escuela de Ingeniería y Ciencias Aplicadas. Original escrito por Holly Evarts.
________________________________________
Referencia de la publicación:
Columbia University School of Engineering and Applied Science. «Robotic ‘gray goo’: Researchers create new kind of robot composed of many simple particles with no centralized control or single point of failure.» ScienceDaily. ScienceDaily, www.sciencedaily.com/releases/2019/03/190320141024.htm
Shuguang Li, Richa Batra, David Brown, Hyun-Dong Chang, Nikhil Ranganathan, Chuck Hoberman, Daniela Rus & Hod Lipson. Particle robotics based on statistical mechanics of loosely coupled components. Nature, 2019 DOI: 10.1038/s41586-019-1022-9
________________________________________