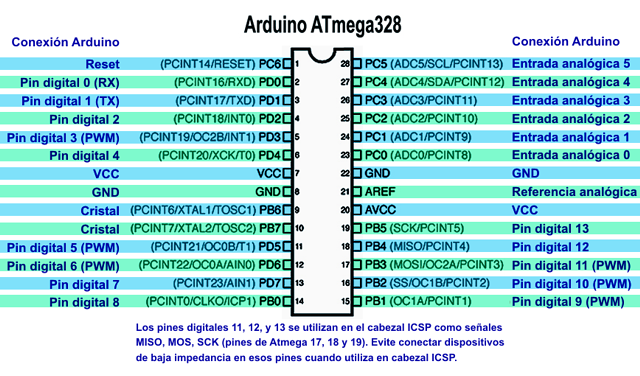
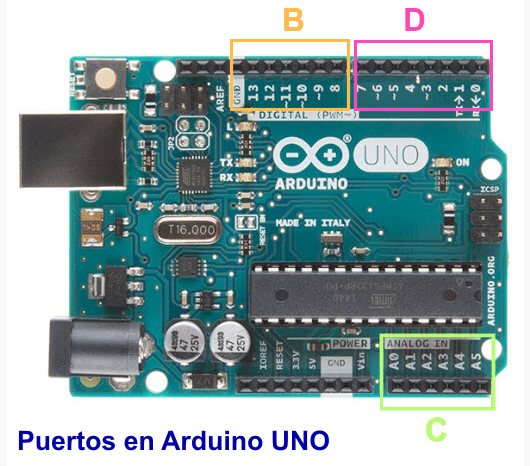
NOTA: Para ver el uso de los pines del ATmega328P en Arduino recomiendo leer el artículo Arduino UNO R3 – Conectándolo al mundo exterior.
Programación avanzada de puertos
En principio, es importante recordar que los puertos de un microcontrolador de 8 bits tienen esa misma cantidad de entradas/salidas, o sea ocho líneas. Esto nos haría pensar que el ATmega328P, que posee tres puertos (B, C y D), dispone de 3 x 8 = 24 líneas de entrada/salida disponibles. Sin embargo, utilizado en un Arduino no es así, como veremos.
La mayoría de los bits de los puertos de los microcontroladores son de uso múltiple, es decir que se comportan de una forma u otra de acuerdo con su configuración. Varias líneas de puertos cumplen funciones vitales en la operación de un Arduino, funciones que no son líneas de entrada/salida de uso general.
El PORTB (puerto B) tiene ocupadas dos líneas de entrada/salida que se utilizan para conectar el cristal oscilador. Estos pines, el PORTB bit-6 y PORTB bit-7, pueden quedar libres si se configura al chip para utilizar el oscilador interno, pero esta opción no podemos utilizarla en el Arduino debido a que ya tiene su sistema basado en la velocidad de cristal de 16 MHz, además de que el cristal está soldado a esos pines en el circuito de la placa.
El PORTC tiene dos bits que no están disponibles, uno de ellos, el PORTC bit-6 se utiliza como entrada de reinicio (RESET), y el otro bit (7) no está cableado hacia el exterior del ATmega328P con cápsula PDIP que viene enchufado en el zócalo del Arduino Uno R3, porque no posee suficientes líneas disponibles en su encapsulado de 28 patas. Y cuando se trata de un chip con encapsulado de montaje superficial TQFP de 32 pines (como en el Arduino Nano y en algunos clones de Arduino Uno), las dos líneas faltantes están dedicadas al convertidor analógico digital (ADC6 y ADC7) y no son pines de entrada/salida digital.
Dos bits del PORTD, el PORTD bit-0 y el PORTD bit-1, se utilizan durante la programación del Arduino, ya que están conectados a la interfaz USB, además de ser los pines TX y RX utilizados para la comunicación serie. Estos pines se pueden utilizar para comunicación serie asincrónica hacia el exterior, y también como entradas o salidas cuando no se está grabando un programa. Pero no deben tener conexiones instaladas mientras se programa el Arduino.
En consecuencia, no se llega a disponer de la cantidad de 24 entradas/salidas que ofrecerían tres puertos de 8 bits.
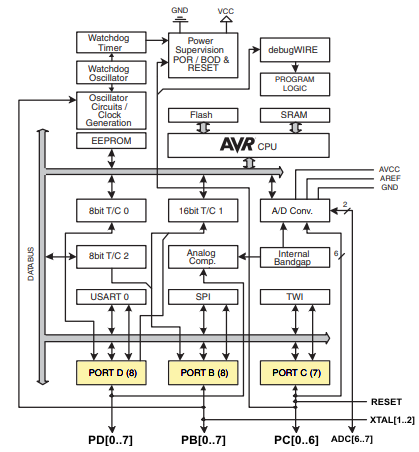
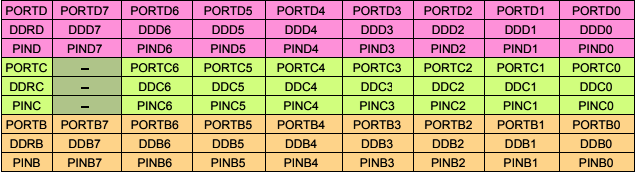
El ATmega328P, como cualquier otro microcontrolador, tiene registros para cada puerto con los cuales se define si cada bit del puerto será usado como entrada o como salida, y en varios casos otra función. El ATmega328P tiene tres puertos: PORTB, PORTC y PORTD, por lo cual hay tres bancos de registros de configuración, uno para cada puerto.
Bancos y puertos de ATmega 328p
| Banco |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
| PORTB |
|
|
Digital 13 |
Digital 12 |
Digital 11 |
Digital 10 |
Digital 9 |
Digital 8 |
| PORTC |
|
|
A5 |
A4 |
A3 |
A2 |
A1 |
A0 |
| PORTD |
Digital 7 |
Digital 6 |
Digital 5 |
Digital 4 |
Digital 3 |
Digital 2 |
Digital 1 |
Digital 0 |
| Valor |
128 |
64 |
32 |
16 |
8 |
4 |
2 |
1 |
Registros
El ATmega328P tiene tres registros de 8 bits con los que administra estos tres puertos:
- DDRx (donde x es B, C o D en este caso) determina si un bit es entrada (fijándolo en 0) o salida (fijándolo en 1)
- PORTx controla si el pin está en nivel ALTO (HIGH) o BAJO (LOW). También define la existencia o no de un resistor de polarización a Vcc (pull-up, en inglés) si es una entrada.
- PINx permite leer el estado de los pines de un puerto (solo es para lectura)
Antes de entrar de lleno a explicar el uso de los registros, veamos primero para qué podría servir este esfuerzo.
Ventajas de usar registros:
- Cada instrucción de máquina necesita un ciclo de reloj a 16 MHz. Las funciones digitalRead() y digitalWrite() se componen cada una de ellas de varias instrucciones de máquina, lo que puede influir negativamente en aplicaciones muy dependientes del tiempo. El uso de los registros PORTx puede hacer el mismo trabajo en muchos menos ciclos de reloj.
- Si es necesario cambiar de estado varios pines simultáneamente en lugar de ir haciéndolo de a uno con un ciclo for, que tomaría mucho tiempo, es posibles escribir directamente al registro y establecer los valores de varios pines de una sola vez.
- Si el código está llegando al límite de memoria de programa disponible (memoria Flash), es posible usar este método para hacer que el código use menos bytes de programa.
Desventajas de usar registros:
- El código no es fácil de entender para novatos.
- Es mucho mas fácil cometer errores de difícil depuración. Por ejemplo con DDRD = B11111111 se pone a todos los pines, D0 a D7 como salida, inclyendo el pin D0 (RX), lo que causará que el puerto serie deje de funcionar.
En las librerías es muy recomendable usar la manipulación directa de registros, de modo de hacerlas mucho más eficientes.
Registro DDRx – Definición de pines como entrada o salida
Al utilizar los registros DDR tenemos la ventaja de que con solo una instrucción podemos declarar el pin como entrada o salida, en cambio, utilizando pinMode() necesitaríamos 8 instrucciones.
Veamos un ejemplo con el registro DDRB del PORTB:

El ejemplo de la imagen define los 4 bits bajos o menos significativos (0 a 3) como entradas, y los 4 bits altos o más significativos (4 a 7) como salidas. Veamos cómo se verían este y otros ejemplos en el programa del IDE de Arduino.
|
|
DDRB = B11110000; // PORTB7-PORTB4 como salidas, PORTB0-PORTB3 como entradas. DDRD = B11111111; // PORTD0-PORTD7 como salidas. DDRB = B00000000; // PORTB0-PORTB7 como entradas. DDRB = B00000111; // PORTB0-PORTB2 salidas, PORTB3-PORTB7 como entradas. PORTD = B11111111; // PORTD0-PORTD7 en ALTO (HIGH). PORTD = B00000000; // PORTD0-PORTD7 en BAJO (LOW). PORTB = B00000101; // PORTB0 y PORTB2 en ALTO (HIGH), PORTB1, PORTB3-PORTB7 en BAJO (LOW). byte variable = PIND; // Guarda en una variable 'byte' el estado de PORTD0-PORTD7. |
Mediante estos registros también podemos controlar las resistencias internas de pull-up que se usan, básicamente, para no dejar los pines de entrada al aire, ya que esto genera ruido eléctrico. Se puede resolver el problema de dos maneras: poner una resistencia externa de 10K a Vcc (+5V) o usar los pull-up internos del microcomputador, que polarizan de la misma forma las entradas y hacen más simple el circuito.
Para habilitar las resistencias pull-up, primero tenemos que configurar como entrada el puerto (con el bit 0), mediante registro DDRx, y luego escribir un 1 en el registro PORTx.
|
|
DDRD = B00000000; // Configura los pines del puerto PORTD (D0-D7) como entradas. PORTD = B00001111; // Habilitar las pull-ups de los pines D0-D3. |
Es el equivalente de usar varias veces las funciones digitalRead() y digitalWrite() de Arduino. Sin embargo, con acceso directo al puerto se puede ahorrar espacio en la memoria flash, porque cada operación con funciones de leer estados de un puerto ocupa varios bytes de instrucciones, y también se puede ganar mucha velocidad, porque las funciones Arduino puede tomar más de 40 ciclos de reloj para leer o escribir un solo bit en un puerto.
Nada mejor que un ejemplo concreto para entender las instrucciones de programa. Veamos un ejemplo con Leds.
Diagrama:
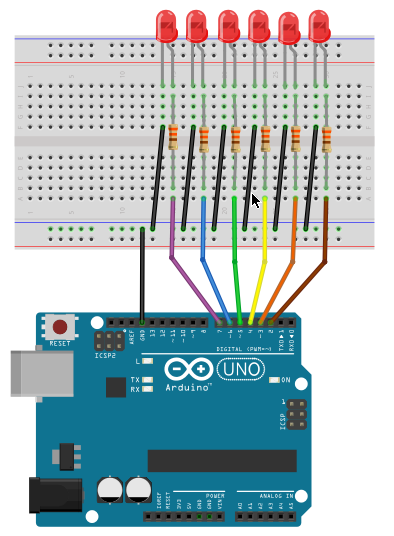
En este ejemplo, durante dos segundos todos los leds encienden, durante otros dos segundos se encienden los impares, luego los pares, y durante dos más se apagan todos.
Abrimos Arduino IDE y escribimos el siguiente código:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 |
void setup(){ DDRD= B11111100; // Utilizamos seis bits del puerto D. // En este ejemplo no utilizamos los pines 0 y 1 del Arduino // para no interferir con la comunicación serie. /* Esta instrucción equivale a hacer esto: pinMode(2,OUTPUT); pinMode(3,OUTPUT); pinMode(4,OUTPUT); pinMode(5,OUTPUT); pinMode(6,OUTPUT); pinMode(7,OUTPUT); */ } void loop(){ PORTD= B11111100; // aquí encenderemos todos los leds delay(2000); PORTD= B10101000; // aquí encenderemos solo una mitad. delay(2000); PORTD= B01010100; // aquí encenderemos la otra mitad. delay(2000); PORTD= B00000000; // aquí los apagaremos todos. delay(2000); } |
Un segundo ejemplo que puede resultar más divertido. Enciende un led en secuencia hacia a un lado y hacia el otro. No hice más sofisticado el programa para claridad y comprensión. Se puede hacer dentro de una estructura for, por ejemplo, tomando el dato a poner el puerto de una matriz. O usando otros recursos más complicados, como desplazar el dato sobre un registro antes de ponerlo al puerto. Pero prefiero que sea didáctico y comprensible para todos.
La secuencia suelen llamarla «El auto fantástico». Hasta se vende un dispositivo con ese efecto de luces para adornar los autos.
El programa es:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 |
void setup(){ DDRD= B11111100; // Utilizamos seis bits del puerto D. // En este ejemplo no utilizamos los pines 0 y 1 del Arduino // para no interferir con la comunicación serie. /* Esta instrucción equivale a hacer esto: pinMode(2,OUTPUT); pinMode(3,OUTPUT); pinMode(4,OUTPUT); pinMode(5,OUTPUT); pinMode(6,OUTPUT); pinMode(7,OUTPUT); */ } void loop(){ PORTD= B00000100; // aquí encenderemos un primer led. delay(200); PORTD= B00001000; // aquí el siguiente. delay(200); PORTD= B00010000; // y sigue la secuencia. delay(200); PORTD= B00100000; // sigue. delay(200); PORTD= B01000000; // sigue. delay(200); PORTD= B10000000; // sigue. delay(200); PORTD= B01000000; // y ahora regresa. delay(200); PORTD= B00100000; // sigue. delay(200); PORTD= B00010000; // sigue. delay(200); PORTD= B00001000; // sigue. delay(200); } |
@nbsp;
Un chip de la liga mayor:
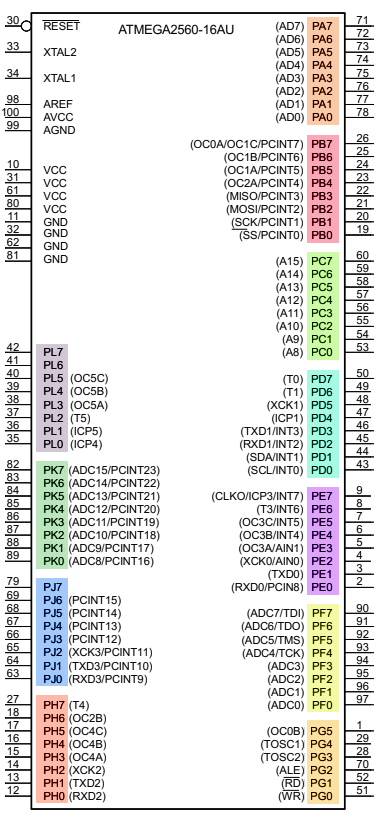
Sólo por completar la información, y dar una idea de la importancia de este tipo de ahorro de código en otros microcontroladores, voy a mostrar algunos datos de los puertos del ATMega2560, el núcleo del Arduino Mega 2560 R3 (esquemático). Un tremendo chip con nada menos que 100 pines y ONCE puertos, que van desde el PORTA al PORTL. ¡Imagínense el banco de registros que hay para manejar!
Microcontrolador ATmega2560-16AU
Placa Arduino Mega 2560 R3
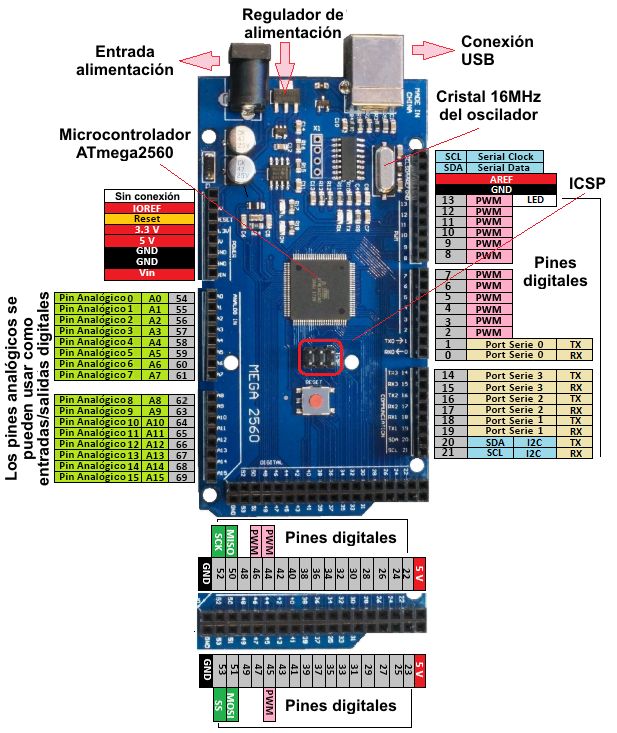
Encapsulado del ATmega2560-16AU utilizado en el Mega 2560