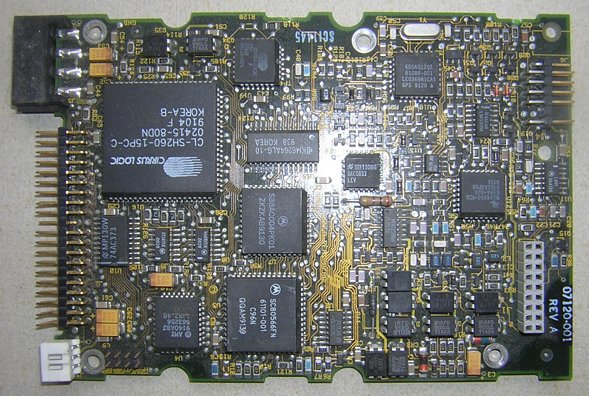
Una plaqueta de disco rígido proveniente de una antigua unidad de disco Conner CP3044 de 40 Mb como la que describiré tiene una importante cantidad de elementos muy utilizables para incorporar en los circuitos de control de los robots. En especial los MOSFET (transistores especiales; la sigla significa Metal Oxide Semiconductor Field Efect Transistor… suena bien importante) IRFDnnn en cápsulas de 4 patitas; son muy buenos para manejar motores y no son difíciles de desoldar.

Los transistores MOSFET rescatados, con cápsula DIP 4 no son obsoletos, son conseguibles aún en el mercado. Soportan un voltaje de 100 V entre los terminales D (Drain o Drenador) y S (Source o Surtidor) y pueden conducir hasta 1A a temperatura ambiente en el caso de los de canal P (IRFD9120); y 50V 1,7A en el caso de los canal N (IRFD010). También se encuentran en las plaquetas de esta época (y son utilizables en reemplazo de los IRFD010) los IRFD123 y IRFD110.