En este artículo ofrecemos información para controlar dispositivos que funcionan con el voltaje de red usando un módulo de relé. Al final de este trabajo usted debería poder controlar cualquier dispositivo eléctrico con un microcontrolador como el Arduino.
Módulo de dos relés
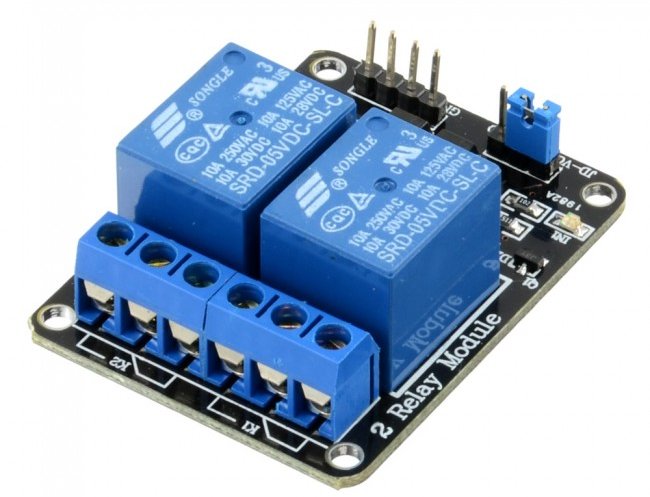
Un relé es un interruptor mecánico operado eléctricamente que se puede encender o apagar, dejando pasar la corriente o no, y se puede controlar con voltajes bajos, como los 5V utilizados en la alimentación de un Arduino.
Nota: «NO» corresponde al inglés Normally Open (normalmente abierto) y «NC» a Normally Closed (normalmente cerrado). Un relé desactivado tiene unidos entre sí los contactos COMÚN y NC, y cuando se lo activa aplicando corriente a su bobina, quedan unidos entre sí los contactos COMÚN y NO.
Controlar un módulo de relé con el Arduino es lo mismo que controlar cualquier otra salida digital. El consumo de corriente de una de sus entradas es el mismo que se necesita para encender un led.
Aquí vemos cómo los relés están marcados en la parte de abajo, del mismo modo que se puede ver el símbolo con la disposición de los contactos del relé en la salida de alto voltaje del módulo:

Diagrama interno de los módulos de relé (se muestra para un solo relé, los circuitos se repiten)
En primer lugar veamos el esquemático que ofrece el fabricante:
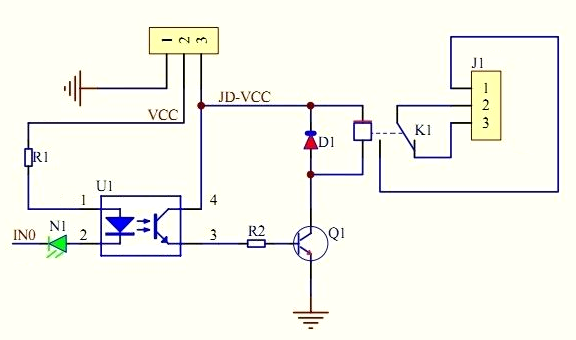
El conector amarillo horizontal, el que no tiene un nombre de identificación, es el juego de pines de entrada de alimentación. Por allí ingresan al módulo tres valores:
■ GND, común o tierra.
■ VCC o alimentación positiva de 5V para la parte de la lógica de entrada: el resistor R1, la sección de emisión de luz de U1 (pines 1 y 2 del optoacoplador), N1 (led indicador) y IN0 (entrada del control).
■ Y JD-VCC, por donde ingresan 5V para alimentar el circuito de accionamiento del relé, compuesto por el fototransistor de U1 (pines 3 y 4 del optoacoplador), el resistor R2, el transistor Q1 para manejar la corriente de la bobina, D1 (diodo para eliminar la contracorriente del bobinado) y la bobina en sí del relé.
El conector J1 lleva al exterior los contactos del relé:
■ 1 es NO (Normally Open = Normalmente Abierto)
■ 2 es C, el contacto Común
■ 3 es NC (Normally Closed = Normalmente Cerrado).
Como es posible que algún lector no conozca el funcionamiento de un optoacoplador (también llamado optoacople), lo explicamos aquí.

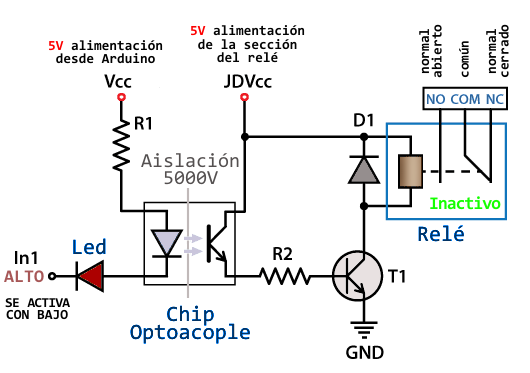
Un optoacoplador es un chip como el de la imagen. Posee una entrada de dos pines (1 y 2 en el diagrama) que conectan a un led (diodo emisor de luz) y una salida de dos pines que conectan a un fototransistor (3 y 4 en el diagrama). El encendido del led pone en conducción al fototransistor, lo que cierra circuito entre su colector (pin 4) y su emisor (pin 3). Lo más importante del funcionamiento es que no hay contacto eléctrico entre entrada y salida. El único contacto es la luz emitida por el led, lo que implica una aislación muy elevada entre entrada y salida (en el orden de los 5000V), protegiendo las entradas (en este caso conectadas a un microcontrolador) ante cualquier riesgo de alto voltaje producido en el área de salida.
Estado desactivado del relé:
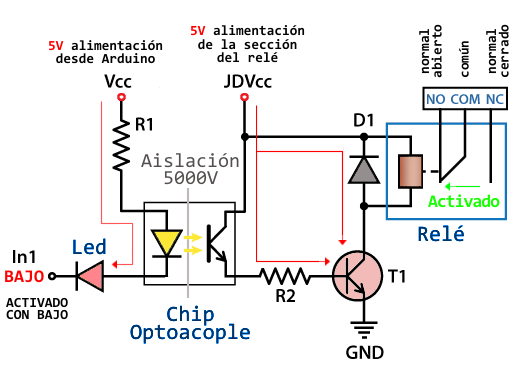
Estado activado del relé:
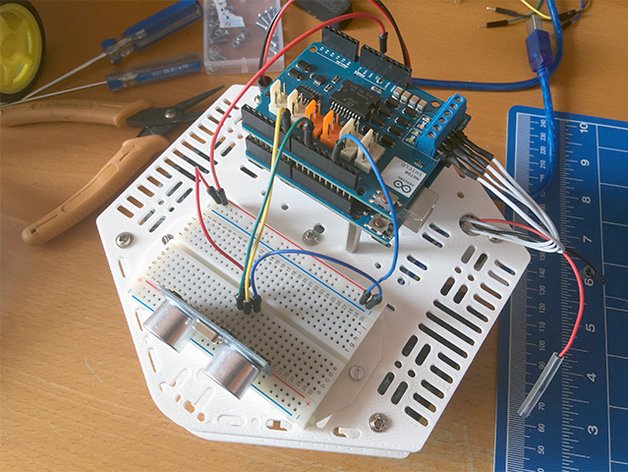
El módulo de relé de la foto del principio de este artículo tiene dos canales (los relé son las piezas azules). Hay otros modelos con uno, cuatro, ocho y hasta dieciséis canales. Este módulo debe ser alimentado con 5V, lo que es apropiado para usar con un Arduino. Hay otros módulos de relé que funcionan con 3,3V, ideal para ESP32, ESP8266 y otros microcontroladores, y también hay modelos de 12V.

Conexiones del módulo de relé
La siguiente figura muestra la función de los contactos del módulo de relé.
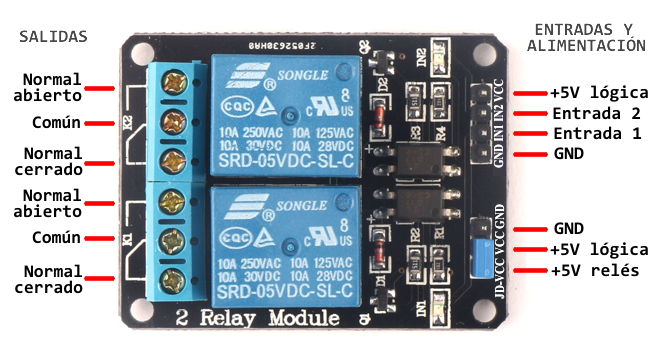
Los seis pines en el lado izquierdo del módulo del relé controlan voltaje alto, y los pines en el lado derecho se conectan al componente que entrega bajo voltaje, como los pines digitales de un Arduino u otro microcontrolador.
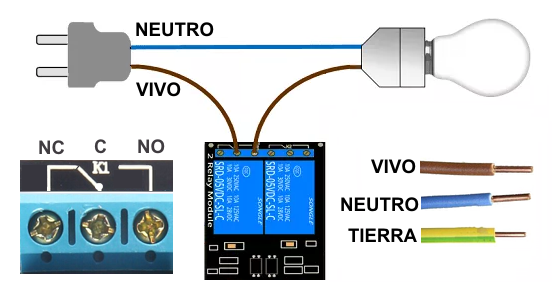
Conexiones de tensión de red
El lado de alto voltaje tiene dos conectores, cada uno con tres contactos: común (COM), normalmente cerrado (NC: Normally Closed) y normalmente abierto (NO: Normally Open).
■ COM : pin común
■ NC (Normalmente cerrado): la salida normalmente cerrada se usa si es necesario que el relé cierre circuito en estado de reposo, sin alimentación incluso, de modo que la corriente fluya por estos contactos hasta que se envíe una señal por las entradas del módulo para abrir ese circuito y detener la corriente.
■ NO (normalmente abierto): la configuración normalmente abierta funciona a la inversa: este contacto del relé está siempre abierto, y el circuito no conduce corriente a menos que se envíe una señal por su entrada para activar el circuito.
Si solo se desea encender una lámpara ocasionalmente, lo mejor es usar la configuración de circuito normalmente abierto.
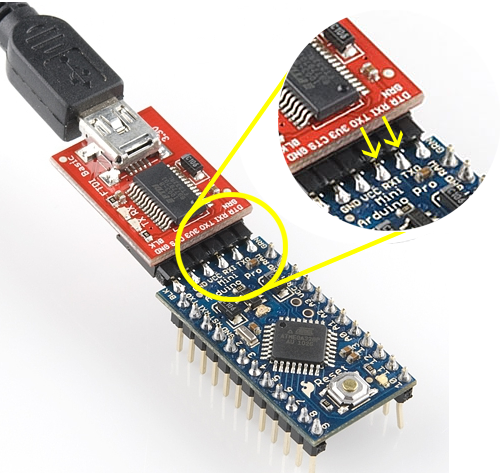
Cableado de pines
El lado de baja tensión tiene un conjunto de cuatro pines, y otro conjunto de tres pines.

El conjunto señalado con flechas de color posee las conexiones de VCC y GND para alimentación de la lógica digital del módulo (esencialmente, los leds de los optoacopladores de entrada), y la entrada 1 (IN1) y entrada 2 (IN2) para controlar los relés 1 y 2, respectivamente, aplicando un nivel lógico BAJO.
El otro conjunto de pines (señalado por flechas grises) tiene los pines JD-VCC, VCC y GND. El pin JD-VCC es la alimentación para los electroimanes de los relés, y se lo alimenta generalmente con una fuente de 5V separada. Para hacerlo se retira el puente (celeste en la imagen) que une la alimentación de los leds de los optoacopladores con la alimentación de las bobinas de los relés. Usando dos fuentes independientes se obtiene la máxima separación eléctrica entre las entradas de control y la línea controlada de 220V, u otro voltaje superior a 5V, en las salidas.
NOTA: observe que el módulo tiene un puente que conecta los pines VCC y JD-VCC; el que se muestra aquí es azul, pero el de su módulo puede ser de un color diferente. El puente permite elegir si el circuito está físicamente conectado a los 5V del Arduino o no, y se puede optar por tenerlo colocado o no. Con el puente puesto, los pines VCC y JD-VCC están unidos. Eso significa que el electroimán del relé se alimenta directamente del pin de alimentación del Arduino, de modo que el módulo de relé y los circuitos de Arduino no están físicamente aislados entre sí. Sin el puente, se debe proporcionar una fuente de alimentación independiente para activar el electroimán del relé a través del pin JD-VCC. Esa configuración aísla físicamente los relés del Arduino, gracias al optoacoplador incorporado en el módulo.
Las conexiones entre el módulo de relé y el Arduino son realmente simples:
■ GND : va a común o “tierra” (lado negativo de la alimentación)
■ IN1 : controla el primer relé (se conectará a un pin digital Arduino)
■ IN2 : controla el segundo relé (debe estar conectado a un pin digital Arduino si se está utilizando este segundo relé. De lo contrario, no necesita conectarlo)
■ VCC : va a 5V
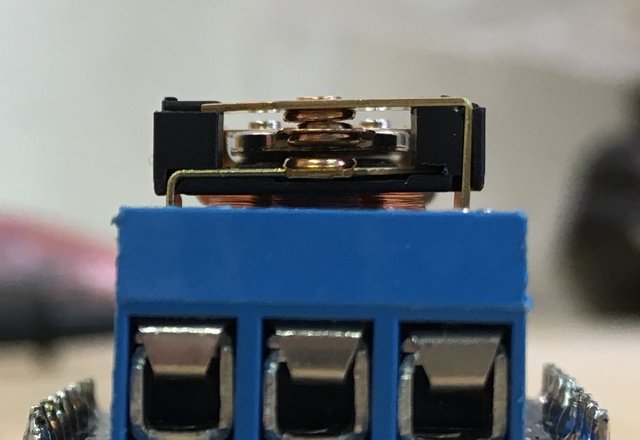
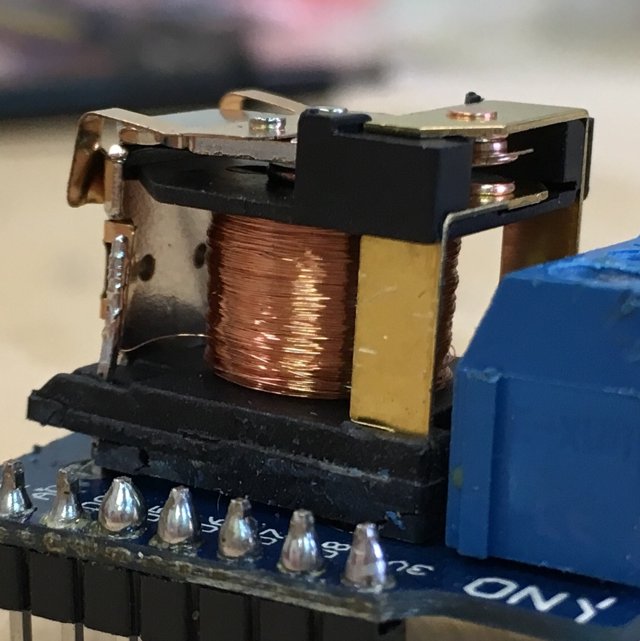
Luego de esta introducción para familiarizarnos con los módulos, veremos algunos detalles mecánicos y electrónicos, y luego un ejemplo sencillo para controlar el relé con un programa en el Arduino.
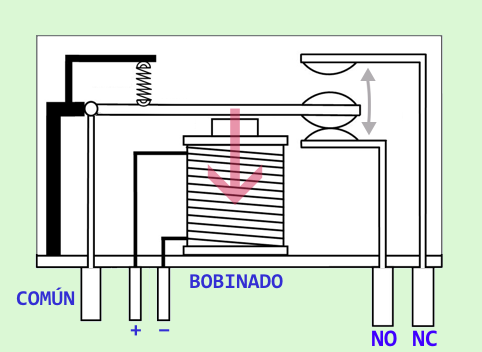
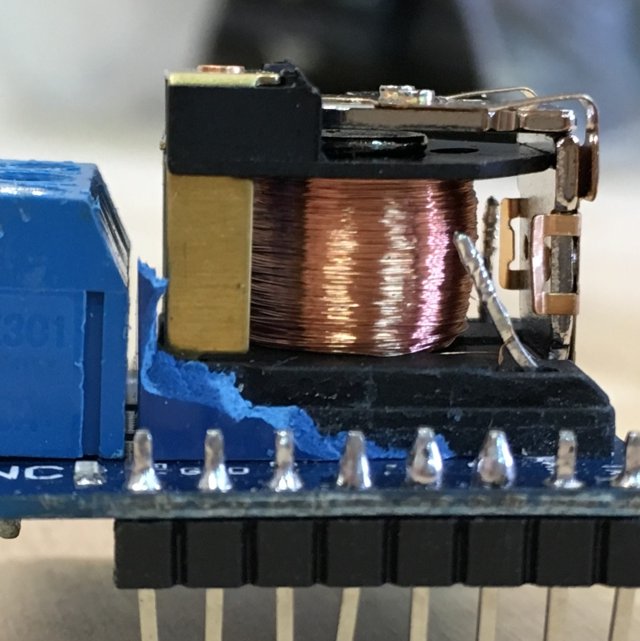
Un relé por dentro:
Conclusión
Controlar un módulo de relé con el Arduino es tan simple como controlar una salida digital: solo se deben enviar señales ALTAS o BAJAS utilizando un pin digital de Arduino, u otro microcontrolador o circuito digital. Con el módulo de relé se pueden controlar casi todos los dispositivos caseros de corriente alterna (no solo lámparas). Si usted va a manejar motores, es conveniente utilizar un componente de potencia de mayor capacidad, por ejemplo un relé de estado sólido.

Esta recomendación se debe a que los contactos de un relé que maneja excesiva corriente con voltajes altos producen chispas al abrirse y al cerrarse, y el efecto es mucho más si la carga que manejan es inductiva (bobinados). Luego de un tiempo, los contactos metálicos pueden quedar pegados entre sí, o dejar de conducir corriente por la carbonización del metal.
En la foto que sigue se muestran a la izquierda contactos de relé en perfectas condiciones, y a la derecha cómo quedan cuando son afectados por las chispas debidas a sobrecargas de corriente.

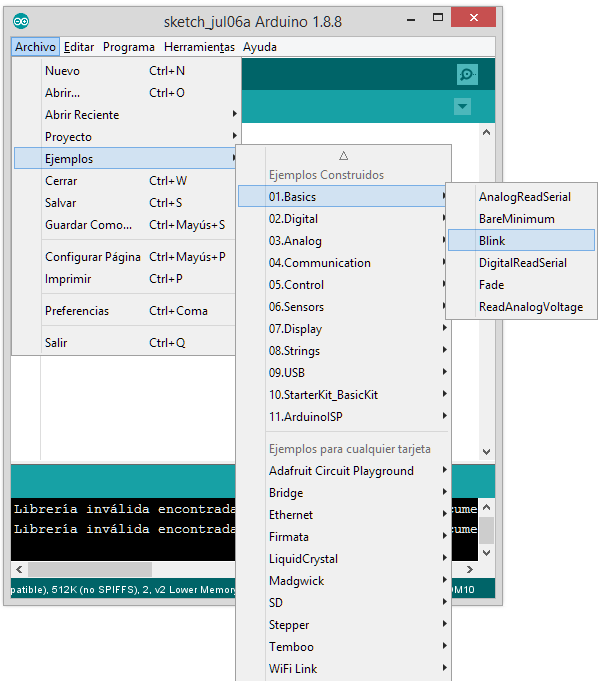
Prueba 1:
Para visualizar de manera rápida y simple la activación de un relé con una lámpara conectada, usted puede correr el programa básico Blink que se ofrece en la lista de ejemplos del IDE de Arduino, conectando la entrada (IN1, por ejemplo) al pin digital 13, y alimentando el módulo con 5V y GND desde las salidas del Arduino. Esto solo es conveniente como experimento, una prueba simple, pero recuerde que hay que limitarse a trabajar con un solo un relé conectado y activado a la vez. El relé cerrará cada vez que el led se apague, una vez por segundo.
|
1 2 3 4 5 6 7 8 9 10 |
void setup() { pinMode(LED_BUILTIN, OUTPUT); } void loop() { digitalWrite(LED_BUILTIN, HIGH); delay(1000); digitalWrite(LED_BUILTIN, LOW); delay(1000); } |
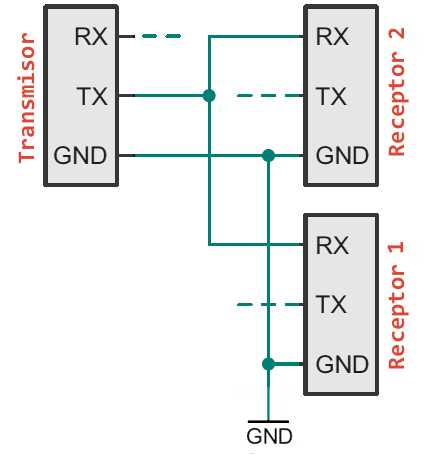
Diagrama para la prueba:

En el artículo que sigue, Activar relés usando línea serie: Domótica (2), mostraremos una de las maneras de comandar estos módulos para su uso en control de luces y artefactos eléctricos.
Artículos relacionados:
■ Módulos de relé y Arduino: Domótica (1)
■ Control con relés por interfaz serie: Domótica (2)
■ Control de relés con control remoto IR: Domótica (3)
■ Control de relés por enlace de 2,4 GHz – módulos NRF24L01: Domótica (4)
■ Descripción y funcionamiento del Bus I2C
■ ¿Qué es la comunicación serie?