Este proyecto es presentado en la página de Zoobotics, donde también se pueden encontrar otras propuestas en el área de la robótica.

En este proyecto, el trabajo consiste en idear, crear el concepto, diseñar y construir un prototipo para pruebas de una plataforma modular de robot compuesto de materiales baratos y livianos, como papel y cartón.
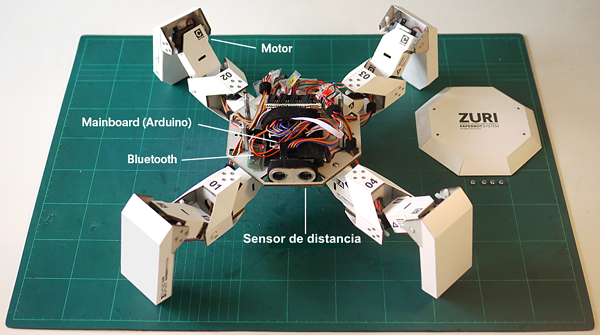
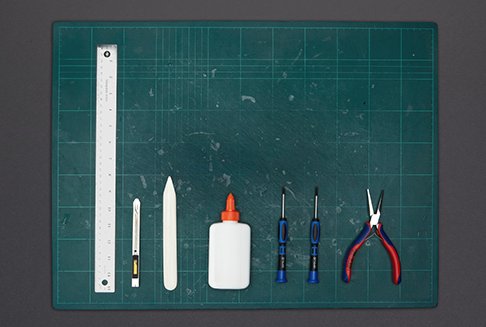
El ZURI es un robot programable con estructura de papel y cartón gris. Este equipo móvil, concebido como un kit, se puede armar con unas pocas herramientas (cutter, regla, una mesa de base para los cortes, una herramienta para marcar y plegar que se utiliza para artesanías y origami, adhesivo y destornillador).
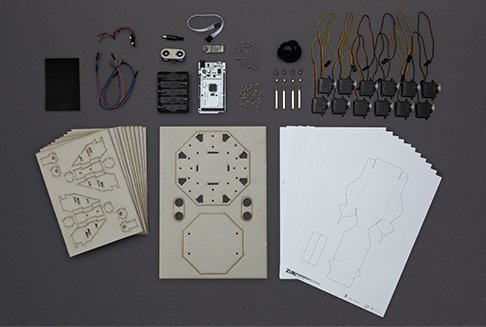
El robot de papel y cartón posee un sensor de distancia, motores servo y sus controladores, y un módulo Bluetooth para controlarlo de manera inalámbrica vía una PC o un teléfono inteligente.
El robot ZURI es un sistema de estructura modular. Se basa en dos variantes de patas (2DOF o dos grados de movimento / 3DOF o tres grados de movimiento) y dos módulos de cuerpo diferentes (1M / 2M). La combinación de los módulos de patas y cuerpos permite armar un montón de variantes. Como resultado, se dan diferentes niveles de dificultad relativos a la programación y la coordinación de los movimientos.
zuri zoobotics video 01 from zoobotics on Vimeo.