Para el monitoreo ambiental, la agricultura de precisión, el mantenimiento de la infraestructura y ciertas aplicaciones de seguridad, una eficiencia lenta y de bajo consumo de energía puede ser mejor que algo rápido, que necesita una recarga continua. Ahí es donde tiene su lugar «SlothBot».
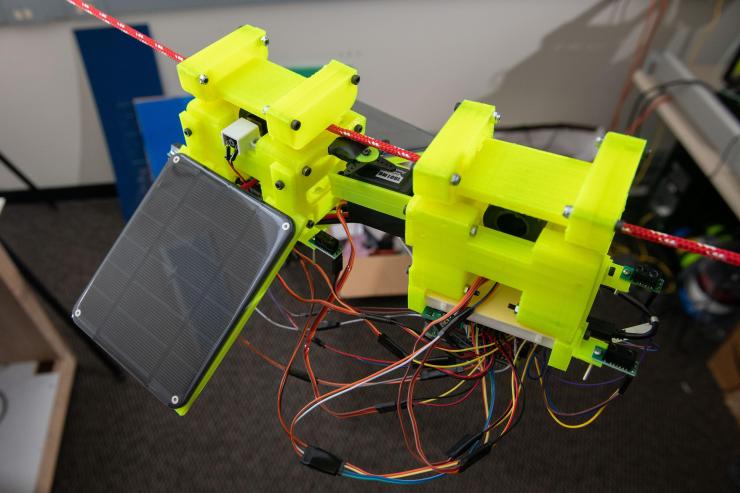
Impulsado por un par de paneles fotovoltaicos y diseñado para permanecer en el dosel del bosque funcionando durante meses, SlothBot (“Robot Perezoso”) se mueve solo cuando es necesario para medir cambios ambientales, como el clima y los factores químicos en el ambiente, que solo se pueden observar con una presencia a largo plazo. El prototipo de prueba del hipereficiente robot, descrito el 21 de mayo en la Conferencia Internacional sobre Robótica y Automatización (ICRA) en Montreal, pronto se encontrará entre los cables de los árboles en el Jardín Botánico de Atlanta.
«En robótica, parece que siempre estamos presionando por robots más rápidos, más ágiles y más extremos», dijo Magnus Egerstedt, Director de la Escuela de Ingeniería Eléctrica e Informática Steve W. Chaddick en el Instituto de Tecnología de Georgia e investigador principal de Slothbot. “Pero hay muchas aplicaciones donde no hay necesidad de ser rápido. Solo tiene que estar allí, persistiendo durante largos períodos de tiempo, observando lo que está ocurriendo».
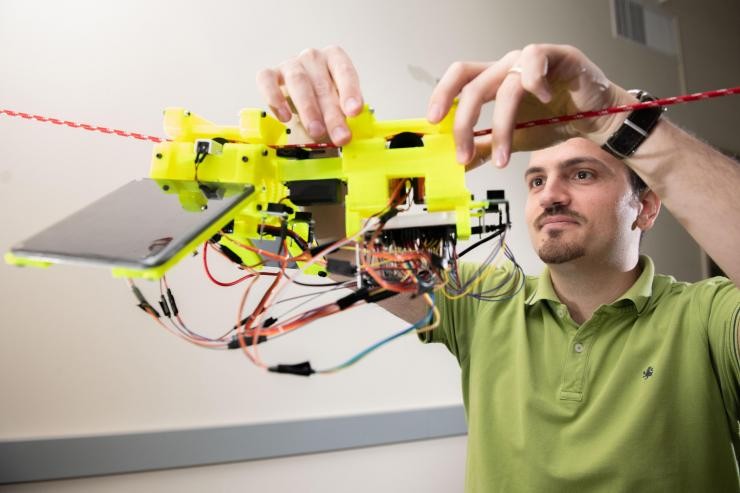
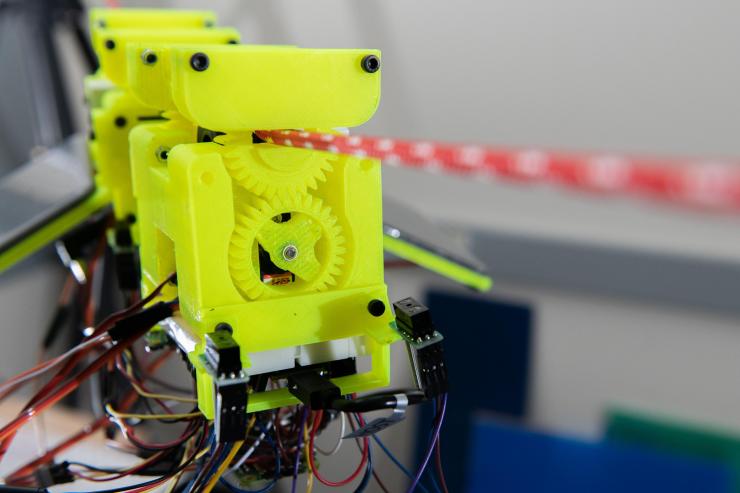
Basado en lo que Egerstedt llamó la «teoría de la lentitud», el asistente de investigación graduado Gennaro Notomista diseñó SlothBot junto con su compañero, Yousef Emam, utilizando piezas impresas en 3D para los mecanismos de engranaje y de paso de cable a cable que son necesarios para rastrear a través de una red de cables en los árboles El mayor desafío para un robot de rastreo de cables es cambiar de un cable a otro sin caerse, dijo Notomista.
«El desafío es sujetar suavemente un cable mientras se agarra a otro», dijo. «Es una maniobra difícil y tienes que hacerlo bien para proporcionar una transición a prueba de fallos. Asegurarse de que los traspasos funcionen bien durante largos períodos de tiempo es realmente el mayor desafío».
Mecánicamente, SlothBot consiste en dos cuerpos conectados por una bisagra controlada. Cada cuerpo aloja un motor de accionamiento conectado a una llanta en la que se monta un neumático. El uso de ruedas para la locomoción es simple, eficiente en energía y más seguro que otros tipos de locomoción por cable, según los investigadores.
SlothBot ha operado hasta ahora en una red de cables en el campus de Georgia Tech. A continuación, una nueva carcasa impresa en 3D, que hace que el robot se vea más como un perezoso, protegerá los motores, engranajes, actuadores, cámaras, computadoras y otros componentes de la lluvia y el viento. Eso establecerá las bases para estudios a más largo plazo en el dosel de los árboles en el Jardín Botánico de Atlanta, donde Egerstedt espera que los visitantes vean pronto las condiciones de monitoreo de SlothBot, en el próximo otoño boreal.
El nombre de SlothBot no es una coincidencia. Los perezosos de la vida real son pequeños mamíferos que viven en los doseles de la selva de América del Sur y Central. Se mantienen comiendo hojas de árboles, y estos animales pueden sobrevivir con el equivalente calórico diario de una papa pequeña. Con su metabolismo lento, los perezosos descansan tanto como 22 horas al día y rara vez descienden de los árboles, donde pueden pasar toda su vida.
«La vida de un perezoso es bastante lenta y no hay mucha emoción a nivel diario», dijo Jonathan Pauli, profesor asociado en el Departamento de Ecología de Bosques y Vida Silvestre de la Universidad de Wisconsin-Madison, quien ha consultado con el equipo de Georgia Tech sobre el proyecto. «Lo bueno de una vida llevada con lentitud es que realmente no se necesita mucha energía. Puede tener una larga duración y persistencia en un área limitada, con muy pocas entradas de energía durante un largo tiempo».
Eso es exactamente lo que los investigadores esperan de SlothBot, cuyo desarrollo ha sido financiado por la Oficina de Investigación Naval de los Estados Unidos.
«Hay mucho que no sabemos sobre lo que realmente sucede en áreas densas cubiertas de árboles», dijo Egerstedt. «La mayoría de las veces, SlothBot solo se quedará colgado, y de vez en cuando se moverá a un lugar soleado para recargar la batería».
Los investigadores también esperan probar SlothBot en una plantación de cacao en Costa Rica, que ya es hogar de perezosos reales. «Los cables utilizados para mover el cacao se han convertido en una autopista de perezosos porque a los animales les resulta útil moverse», dijo Egerstedt. «Si todo va bien, desplegaremos SlothBots a lo largo de los cables para monitorear a los perezosos».
Egerstedt es conocido por los algoritmos que manejan enjambres de pequeños robots con ruedas o voladores. Pero durante una visita a Costa Rica, se interesó por los perezosos y comenzó a desarrollar lo que él llama «una teoría de la lentitud» junto con el profesor Ron Arkin en la Escuela de Computación Interactiva de Georgia Tech. La teoría aprovecha los beneficios de la eficiencia energética.

«Si estás haciendo cosas como el monitoreo ambiental, quieres estar en el bosque durante meses», dijo Egerstedt. «Eso cambia tu forma de pensar acerca de los sistemas de control a un alto nivel».
Ya se usan robots voladores para monitoreo ambiental, pero sus necesidades de alta energía implican que no pueden quedarse por mucho tiempo. Los robots con ruedas pueden arreglárselas con menos energía, pero pueden quedar atrapados en el lodo o ser obstaculizados por las raíces de los árboles, y no puede obtener una vista de gran detalle desde el suelo.
«Lo que cuesta energía más que cualquier otra cosa es el movimiento», dijo Egerstedt. “Moverse es mucho más costoso que sentir o pensar. Para los robots ambientales, solo debes moverte cuando es absolutamente necesario. Teníamos que pensar en cómo sería eso».
Para Pauli, que estudia una variedad de vida silvestre, ha sido gratificante trabajar con Egerstedt para ayudar a SlothBot a cobrar vida.
«Es genial ver a un robot inspirado en la biología de los perezosos», dijo. “Ha sido divertido compartir cómo viven los perezosos y otros organismos que viven en estos ecosistemas durante largos períodos de tiempo. Será interesante ver a los robots reflejando lo que vemos en las comunidades ecológicas naturales”.
Esta investigación fue patrocinada por la Oficina de Investigación Naval de los EE. UU. A través de la concesión N00014-15-2115.