¿Qué es un ESP8266?
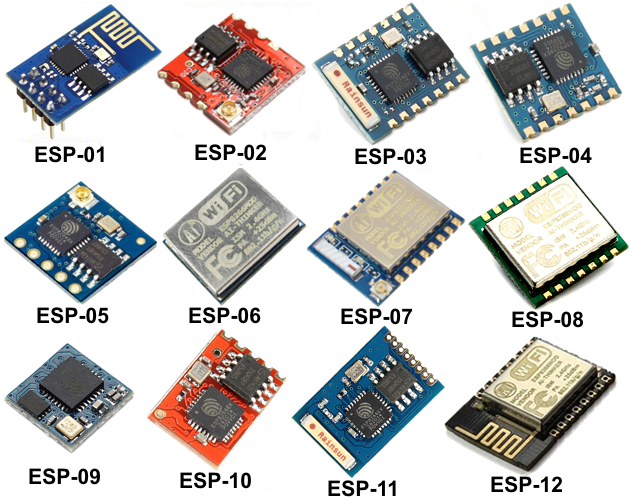
El ESP8266 es un chip con capacidad Wi-Fi con un stack TCP/IP completo y un microcontrolador, fabricado por Espressif, una empresa China. El primer chip se hizo conocido el mercado con el módulo ESP-01, desarrollado por la empresa AI-Thinker. Este pequeño módulo permite a otros microcontroladores conectarse a una red inalámbrica Wi-Fi y realizar conexiones simples con TCP/IP usando comandos al estilo Hayes (comandos AT).
Diversos modelos de módulos que utilizan el ESP8266
Características
• CPU RISC de 32-bit: Tensilica Xtensa LX106 con un reloj de 80 MHz. El reloj de la CPU y la memoria flash puede duplicarse por overclocking en algunos dispositivos. La CPU puede funcionar a 160 MHz y la memoria flash puede trabajar entre 40 MHz y 80 MHz. Varía según la versión del chip.
• RAM de programa de 64 KB, RAM de datos de 96 KB
• Capacidad de memoria externa flash QSPI de 512 KB a 4 MB (puede manejar hasta 16 MB)
• IEEE 802.11 b/g/n Wi-Fi
o Tiene integrados: TR switch, balun, LNA, amplificador de potencia de RF y una red de adaptación de impedancias
o Soporte de autenticación WEP y WPA/WPA2
• 16 pines GPIO (Entradas/Salidas de propósito general)
• Interfaces SPI, I²C,
• Interfaz I²S con DMA (comparte pines con GPIO)
• Pines dedicados a UART, más una UART únicamente para transmisión que puede habilitarse a través del pin GPIO2
• 1 conversor ADC de 10-bit
El ESP8266 se puede programar desde el IDE de Arduino. Para eso hay que instalar lo que se llama un plugin, en el que está incluido todo lo necesario para compilar y subir programas que fueron escritos tal como si fuesen .INO de Arduino.
Debemos incorporar librerías y los programas de manejo de las placas con el chip ESP8266 a nuestro IDE. Para hacerlo, debemos indicarle la URL desde donde se obtienen.
Para hacerlo, debemos abrir el menú Archivo, y luego Preferencias.
Veremos este panel, en la parte inferior el recuadro de texto rotulado Gestor de URLs Adicionales de Tarjetas. Dentro de él, usando copiar y pegar, se debe introducir el texto indicado aquí:
http://arduino.esp8266.com/stable/package_esp8266com_index.json
(copie y pegue en el recuadro):

Luego pulse en el botón Ok.
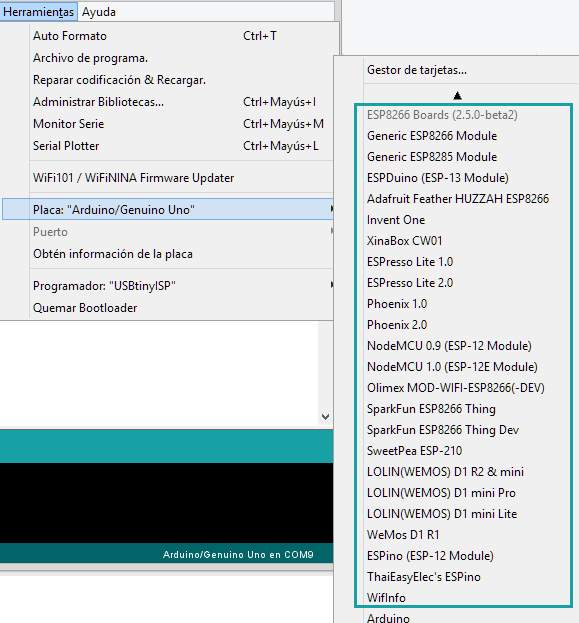
Ahora debemos ir al menú Herramientas, luego Placa.

Y finalmente Gestor de Tarjetas, se abrirá una ventana como la que sigue, en la cual escribimos, en el recuadro superior de filtro/busqueda, “ESP8266” (antes de terminar de escribir ya aparecerá el Gestor de Tarjetas que buscamos, que indica que fue creado por “ESP8266 Community”. Allí pulsamos sobre Instalar:

Al abrir nuevamente Herramientas, y luego Placa, deslizamos la lista para ver lo que aparece al final de ella (abajo), y vemos que ya existen las opciones referidas a los ESP8266:
Ejemplo de programa:
Trabajaremos en este ejemplo dos modelos de placa que utilizan el chip ESP8266: ESP-01 y NodeMCU (ESP-12E).
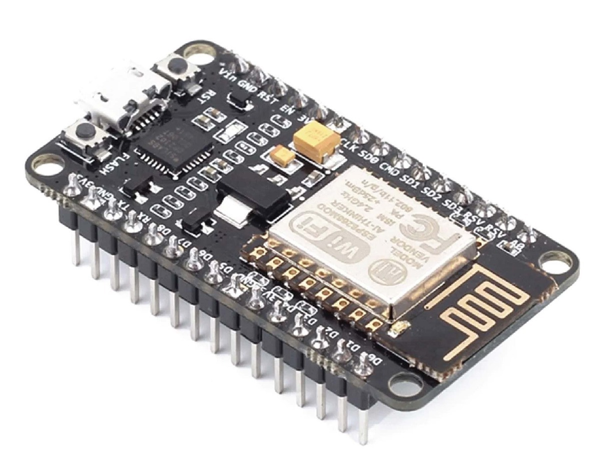
El NodeMCU es una placa de desarrollo que contiene el módulo ESP-12E incorporado, más todos los elementos necesarios de apoyo para comunicarse con ella, entre éstos un conector USB, regulador de voltaje, botón de reinicio, un botón “flash” que se utiliza para programar el módulo, hileras de pines enchufables, etc.
Diseñaremos un circuito simple para hacer parpadear un LED en los ESP utilizando el IDE de Arduino para programarlos. La pregunta que uno se puede hacer es ¿por qué siempre lo primero que se enseña es a hacer que parpadee un LED? Y no es mala pregunta. La respuesta es que si podemos hacer parpadear un LED usando un pin de salida de un dispositivo, quiere decir que podemos encender o apagar cualquier dispositivo electrónico. Sólo es necesario, si conectamos algo a ese pin, que el consumo que necesita ese aparato para funcionar no supere lo que puede entregar el pin de salida de nuestro sistema. Pero esto no es condicionante: se soluciona —como en cualquier circuito electrónico— adaptando el voltaje y la corriente con componentes simples, como transistores, MOSFET o relés. Y entonces ya estamos encendiendo y apagando ya sea un LED, una lámpara o un horno eléctrico.
En los ESP, a las entradas y salidas se les llama GPIO, sigla que viene de las palabras en inglés General Purpuse Input/Output, en castellano Entrada/Salida de Propósito General.
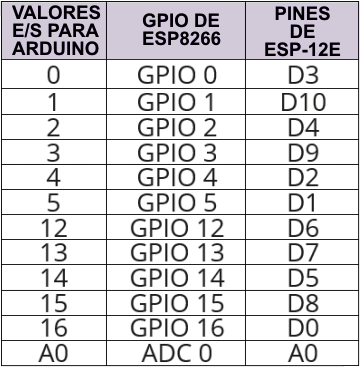
Acerca de la asignación de GPIOs, la siguiente tabla es una referencia rápida sobre cómo asignar los GPIOs de ESP8266 en el código Arduino.
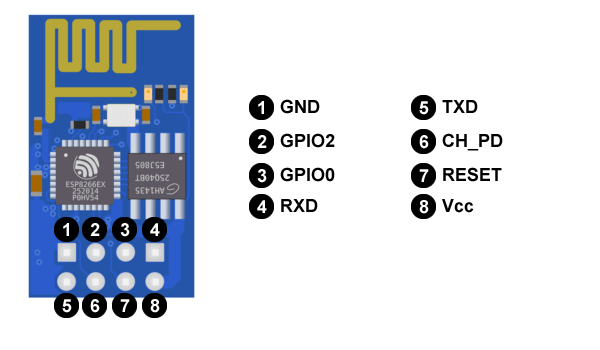
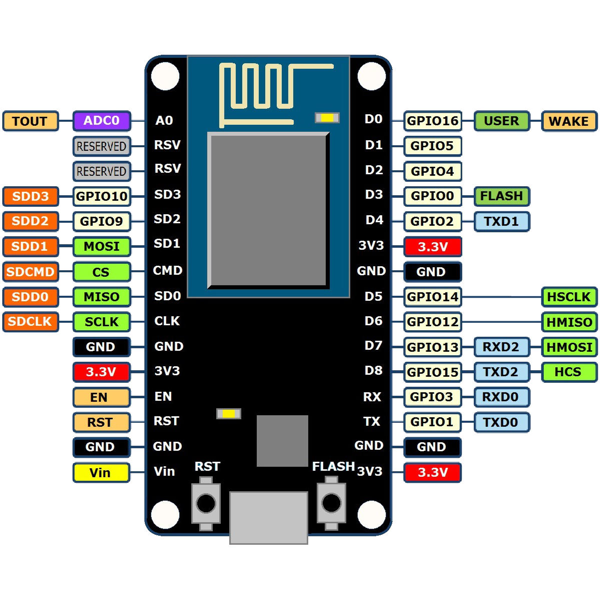
Aquí está la ubicación de cada pin la placa física:
ESP-01
NodeMCU / ESP-12E
Importante: en la siguiente sección, llamada «Cómo escribir el programa en el IDE de Arduino», cuando definimos: salida = 0 nos referimos al GPIO 0, y si definimos: salida = 2 nos referimos a GPIO 2. En el firmare interno del ESP se define así. No hay que preocuparse por esto, simplemente recordar que 0 se refiere a GPIO 0 y 2 se refiere a GPIO 2.
Cómo escribir el programa en el IDE de Arduino
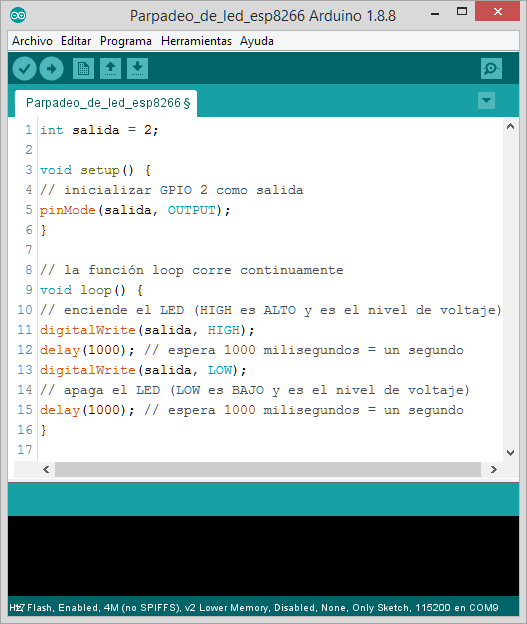
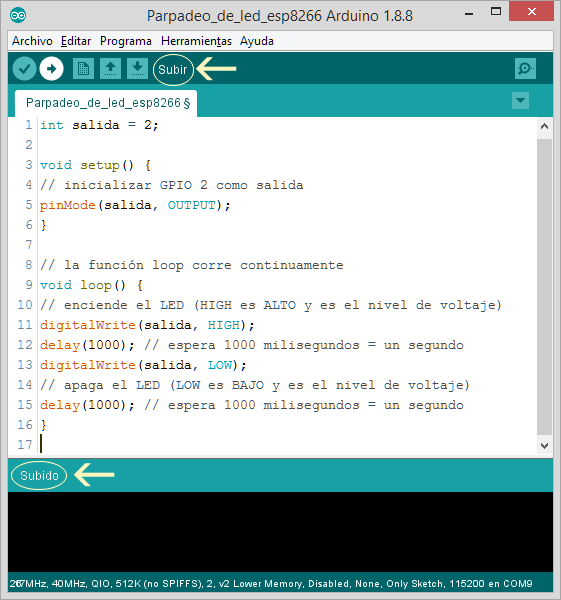
El programa para hacer parpadear un LED es muy simple:
|
|
int salida = 2; void setup() { // inicializar GPIO 2 como salida pinMode(salida, OUTPUT); } // la función loop corre continuamente void loop() { // enciende el LED (HIGH es ALTO y es el nivel de voltaje) digitalWrite(salida, HIGH); delay(1000); // espera 1000 milisegundos = un segundo digitalWrite(salida, LOW); // apaga el LED (LOW es BAJO y es el nivel de voltaje) delay(1000); // espera 1000 milisegundos = un segundo } |
Cómo funciona el programa:
- 1. Creamos una variable entera (int) llamada salida = 2 que hace referencia a GPIO 2
- 2. En setup(), usamos la función pinMode(salida, OUTPUT) para configurar el GPIO 2 como una SALIDA (OUTPUT). Este código de inicialización se ejecuta una sola vez.
- 3. A continuación, en loop() (función bucle), utilizamos dos funciones digitalWrite() y delay().
Es una sección de código que se repite una y otra vez hasta que se quite la alimentación del ESP o se le cambie el programa.
- 4. Enciende el LED durante 1 segundo (1000 milisegundos) usando digitalWrite(salida, HIGH) y espera de 1 segundo con delay(1000).
- 5. Luego apaga el LED usando digitalWrite(salida, LOW) y espera de 1 segundo con delay(1000).
- 6. El programa continúa indefinidamente, repitiendo los pasos 4. y 5.
Veremos que el LED parpadea, un segundo encendido, un segundo apagado.
Escribiendo el programa en el ESP8266
La opción más fácil es cuando se escribe código para el ESP8266 dentro del NodeMCU/ESP-12E, que tiene implementada la comunicación USB, y por lo tanto la manera de programar el chip. En cambio, al trabajar con el módulo ESP-01 (o algún otro modelo de ESP) es necesario tener un módulo conversor de USB a TX/RX, como un FTDI.
NodeMCU con ESP12E:
Subir código en este módulo es mucho más simple, ya que tiene incorporados los circuitos auxiliares necesarios para la programación. Sólo hay que enchufar el módulo a través del cable USB a la computadora sin que sea necesaria ninguna conexión adicional.
En el menú Herramientas del IDE de Arduino seleccione como Placa “NodeMCU 1.0 (ESP-12E Module)” y a continuación, también en el menú Herramientas, elegir el COM a que esté conectado el NodeMCU. No es necesaria más configuración. Se verá así (observar la línea debajo de todo en la ventana, que indica el dispositivo y el puerto COM):
El COM en su computadora no va a ser exactamente el COM9, aunque se puede dar la casualidad que lo sea. Será el COM virtual que el sistema operativo haya creado al conectar el módulo de ESP a su USB.
Después de comprobar estos detalles de configuración del IDE, utilice el botón “Subir” en el IDE y espere hasta que indique que ya ha completado la programación.
Para conectar el LED al NodeMCU utilice el siguiente circuito. El LED lleva un resistor de 220 Ohm en serie. La conexión va a GND y a la pata D4 del NodeMCU (GPIO 2).
NOTA: EL CIRCUITO A CONTINUACIÓN ES UN EJEMPLO EN EL QUE SE CONECTA ALGO A UN PIN EXTERNO. EL MODELO MÁS HABITUAL DE NODEMCU EN EL MERCADO YA TIENE UN LED CONECTADO EN EL GPIO 2 Y OTRO EN GPIO 16, INCLUIDOS EN LA PLACA. SI LO DESEA, ANTES DE ARMAR EL CIRCUITO PRUEBE CON LA PLACA SOLA. PRUEBE UNA VEZ USANDO salida = 2, Y OTRA USANDO salida = 16. FUNCIONARÁ EN AMBOS CASOS, CON DOS LEDS DISTINTOS SI SU MODELO NO TIENE ESTE LED INCORPORADO, CABLEE EL CIRCUITO DE ABAJO.

Luego de cargar el programa al ESP8266, si todo salió bien veremos parpadear el LED cada 1 segundo.
Parpadeo con GPIO 2
Parpadeo con GPIO 16
Prueba usando el módulo ESP-01
Para subir código a un ESP-01 hay que establecer una comunicación USB a través de un conversor de USB a niveles TTL (que maneje voltajes de 3,3V) a la conexión serie TX/RX del ESP8266, con un módulo como el que se ve en la figura. Hay muchos modelos, pero es recomendable buscar uno que tenga un chip FTDI y que en su placa facilite la conversión de voltajes de 5V a 3,3V (que es el voltaje con el que funciona el ESP8266).
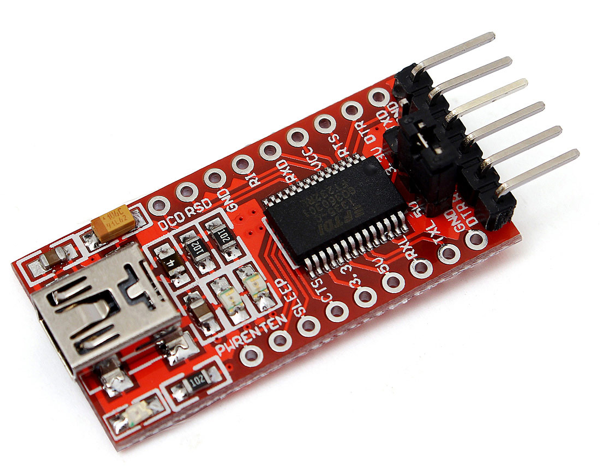
Es importante remarcar que lo primero que debemos hacer, al comprarlo, y antes de conectarlos, es buscar el selector de voltajes de 5V a 3,3V. Debemos asegurarnos de que el módulo FTDI esté fijado en el modo de operación a 3,3V, como muestra la imagen de abajo.

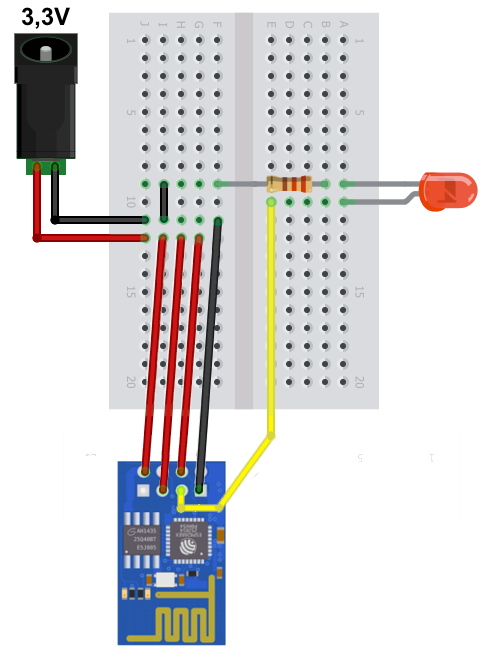
El circuito de abajo indica las conexiones que debemos hacer para establecer la comunicación del ESP-01, a través del módulo FTDI, hacia el conector USB, para lograr la comunicación serie.

La conexiones son:
• RX ► TX
• TX ► RX
• CH_PD ► 3,3V
• GPIO 0 ► GND
• VCC ► 3,3V
• GND ► GND
Nota: en el circuito de la imagen de arriba, GPIO 0 está conectado a GND. Esto es porque queremos subir código. Al subir un programa por primera vez desde el IDE del Arduino se requiere que el ESP grabe en su flash un nuevo firmware —firmware es un software de bajo nivel, interno, que permite controlar circuitos eléctricos—. En uso normal (cuando no estamos grabando en la memoria flash un firmware nuevo) el pin GPIO 0 se conecta a VCC (3,3V).
En el caso de que usted tenga necesidad de instalar un driver en una PC con Windows porque no le reconoce el módulo en un puerto COM, sea este u otro con chip FTDI, el sitio oficial para conseguirlos es: http://www.ftdichip.com/Drivers/VCP.htm. Si compra uno nuevo, pregunte siempre al vendedor. Muchas veces tienen las soluciones en un enlace en su página web de ventas.
Normalmente, si usted está conectado online, el driver se instala automáticamente.
Preparando su IDE de Arduino
Una vez que conectamos el ESP8266 a través del módulo FTDI a su computadora, corra el IDE de Arduino. Abra el menú Herramientas y seleccione la Placa: “Generic ESP8266 Module”. Las configuraciones estándar deberían verse así:
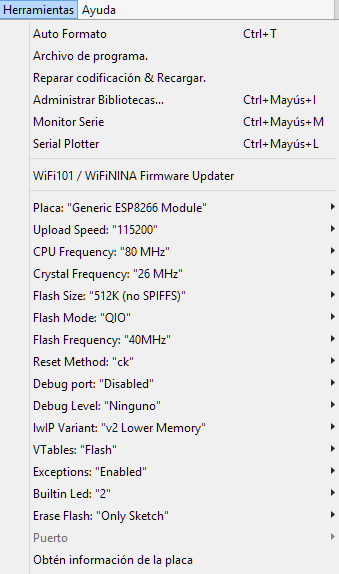
El número de puerto COM que aparezca listado va a depender de cada computadora, e incluso puede cambiar alguna otra vez que conecte otro ESP, ya que ese número lo determina dinámicamente el sistema operativo.
En este momento ya se puede pulsar “Subir” en el IDE Arduino. Pasará un tiempo hasta que aparezca la indicación de que el programa ha sido subido.
El funcionamiento final: Circuito para el ESP-01 y el LED
Luego de haber subido el código al módulo, desconecte de la computadora y recablee siguiendo el diagrama a continuación:
Al conectar los 3,3V de alimentación al ESP-01, todo estará listo. Si las cosas salieron bien, el LED debería parpadear encendiéndose y apagándose cada 1 segundo.
Para cualquier consulta, comuníquese conmigo en el grupo de facebook https://www.facebook.com/groups/GrupoRobotsDidacticos/