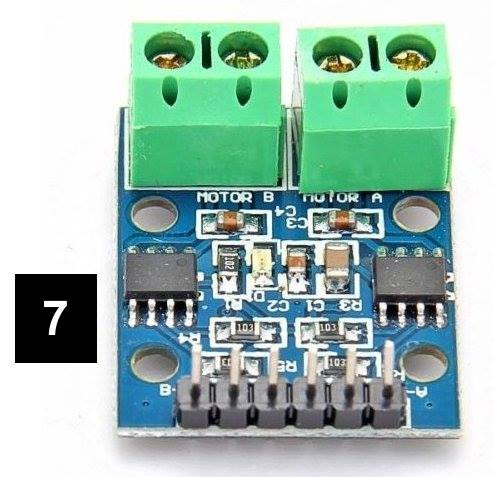
Cuando queremos crear un robot que distinga el blanco del negro sobre una superficie, se realiza esa detección con sensores infrarrojos reflectivos. Si la necesidad de determinar las ubicaciones debajo del sensor requiere precisión, hay que usar conjuntos de varios sensores, y sus salidas conectarlas a varios pines de entrada de un microcontrolador.
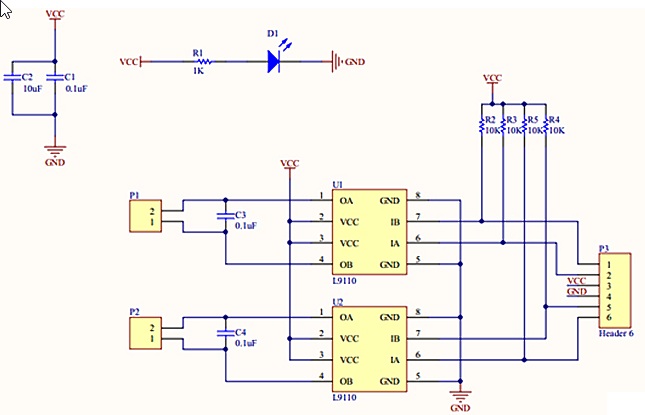
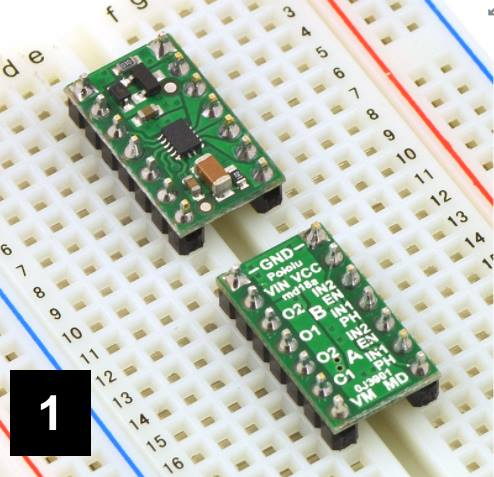
Por ejemplo, para seguidores de línea veloces (velocistas) tenemos la opción de utilizar un sensor como el de la imagen de arriba, el QTR-8A, fabricado por Pololu. O un conjunto sensor similar hecho por nosotros con, por ejemplo, un conjunto de CNY-70.

La mayoría de las veces los microcontroladores que usamos para controlar un robot tienen una cantidad limitada de pines de entrada y salida, y si tenemos que usar uno de éstos por cada sensor infrarrojo tendremos problemas para añadir funcionalidades a nuestro robot: comunicación serie, acelerómetros, giroscopios, I2C, sensores de distancia, detectores de choque, pulsadores o llaves, motores, tacómetros, leds, etc.
En los robots seguidores de línea el mínimo es dos sensores infrarrojos, aunque con esta cantidad el robot seguidor se moverá oscilando, y es muy posible que se escape en curvas cerradas o cruces de líneas. En los robots de Sumo se necesitan 4, incluso más si es un diseño más sofisticado, y en los seguidores de línea velocistas suele colocarse una hilera de 6 sensores o más.
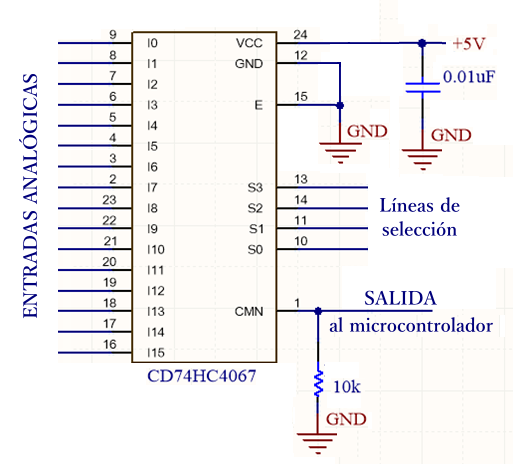
Esto lleva al uso de demasiado pines de entrada en nuestro micro. Se podría utilizar algún tipo de multiplexor (como el CD74HC4067) para ir leyendo cíclicamente los sensores, pero eso significa el uso adicional de al menos 3 líneas, necesarias para seleccionar las entradas del multiplexor si se trata de un conjunto desde 6 y hasta 8 sensores, o 4 líneas adicionales si tenemos hasta 16 sensores. (Esta cantidad de sensores no es excesiva en un robot medianamente operativo y desarrollado.)
Pero veremos una manera de leer varios sensores de infrarrojos usando sólo un pin analógico del microcontrolador.
La idea es vieja: convertir la activación de los sensores en una selección de resistores que aportan cada uno diferentes corrientes, y que al sumarse entregan una salida combinada, con valores diferentes de voltaje. A esta configuración se le llama “resistor ladder” (escala de resistores) y lo que construimos es, en concreto, un convertidor digital a analógico.
Al usar varias resistencias, dependiendo de la entrada que se active, el pin del micro recibe una tensión distinta. Si el conjunto de resistores está bien diseñado, se puede determinar cuál es la entrada que se ha activado.
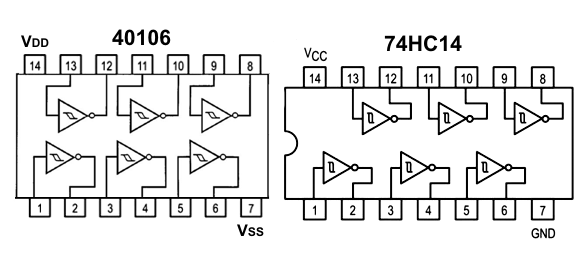
Con sensores basados en led infrarrojos y fototransistores, la señal obtenida será analógica y relacionada con la luz que se refleja, a menos que los sectores blanco y negro sean muy definidos y que no haya luz ambiente que interfiera. Para convertir estos valores intermedios a ceros y unos utilizamos un chip CMOS inversor Schmitt trigger 40106 o 74HC14, y en sus salidas ponemos resistencias en serie de distintos valores, que al final de la cadena se unen a un punto en común.
Desde ese punto se tomará el valor de la tensión utilizando una entrada analógica, y si está bien calculado el conjunto de resistencias, el valor analógico será distinto dependiendo del sensor que se haya activado. De ese modo, en el caso de un seguidor de líneas, conoceremos la posición del robot respecto al curso que debe seguir.
La ventaja es que tener varios sensores CNY70, o un conjunto QTR-8A ya no es un problema, porque podemos leer todos los valores con un único pin de nuestro microcontrolador, y dejar el resto libre para otras funciones.
Recordemos que la conversión de analógico a digital dentro del módulo de un microcontrolador lleva tiempo. Por cada sensor que se lee con los pines analógicos se produce una pausa, ya que la lectura de un convertidor de analógico a digital (ADC) típico tarda un tiempo en completarse. Si se conectan y leen por separado, a este retardo hay que multiplicarlo por la cantidad de sensores.
Sin embargo, con esta solución sólo se hace UNA lectura analógica.
Como vamos a usar un inversor schmitt trigger, y éste sólo nos da una señal alta (5V) o baja (0V) en su salida, con las resistencias siempre vamos a obtener los mismos resultados de tensión, aunque cambiemos de entorno (pistas de competición, o caseras con distinta iluminación), por tanto no hay necesidad de calibrar.
Y utilizando las resistencias correctas, sólo es necesario tener un ADC de 8 bits (0-255) para medir el voltaje (en tramos de 0,02V aproximadamente) con una referencia de 5V. En un Arduino el ADC tiene 4 veces más resolución, ya que su conversión es de 10 bits, o sea que entrega valores digitales entre 0 y 1023.
Pondremos como ejemplo 8 sensores infrarrojos que leen una superficie que tiene fondo blanco (que devuelve un valor cercano a 0), y la línea de color negro (que es cuando devuelve un voltaje mayor). Como inversor schmitt trigger se puede usar un 40106 o un 74HCT14. Ambos tienen 6 entradas/salidas. Como se necesitan 2 entradas más para llegar a las 8 del sensor, debemos usar un segundo chip inversor. También se necesitan 8 diodos y 9 resistores.
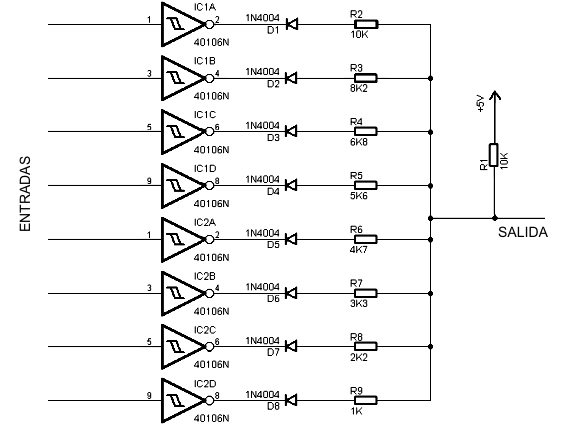
La salida de cada CNY-70, o de cada elemento del conjunto QTR-8A, va dirigida a una de las entradas de uno de los inversores. La salida correspondiente de ese inversor va a un diodo de señal como el 1N914 o 1N4148. Esto es necesario, ya que al estar unidas todas las salidas del otro lado de los resistores, con los diodos se evita que si una salida está a 5V, y otra a 0V, se derive una corriente entre ellas.
Después del diodo viene el resistor, que dependiendo de su valor hará que la tensión en el punto de unión caiga más, o menos. El valor del resistor debe ser único, diferente del de otros sensores, para que cada caída de tensión sea distinta.
Finalmente se unen todas las salidas a otro resistor para crear lo que se denomina un divisor de tensión. La línea que va al pin analógico del microcontrolador se debe conectar en ese punto, para que éste pueda medir el voltaje total y diferenciar qué sensor o sensores se activan.
Este resistor de terminación al que se une el resto va, en su otro extremo, a la alimentación (Vcc).
Esta configuración está diseñada para poder leer un fondo blanco con una línea negra, siempre y cuando los sensores nos den un valor cercano a 0 cuando leen el fondo blanco, y un valor mucho mayor cuando leen la línea negra. Si se necesita cambiar este comportamiento, se puede conectar la resistencia final a masa e invertir los diodos.
Ahora que ya recibimos distintas tensiones en el pin analógico del microcontrolador, dependiendo de los sensores que estén activos o no, debemos plantearnos cuántas mediciones posibles podemos obtener.
Como trabajamos en el ejemplo de un seguidor velocista, se pueden dar los siguientes casos:
- Todos los sensores leen el fondo blanco.
- Un sensor lee la línea negra y el resto el fondo blanco.
- Dos sensores leen la línea negra y el resto el fondo blanco.
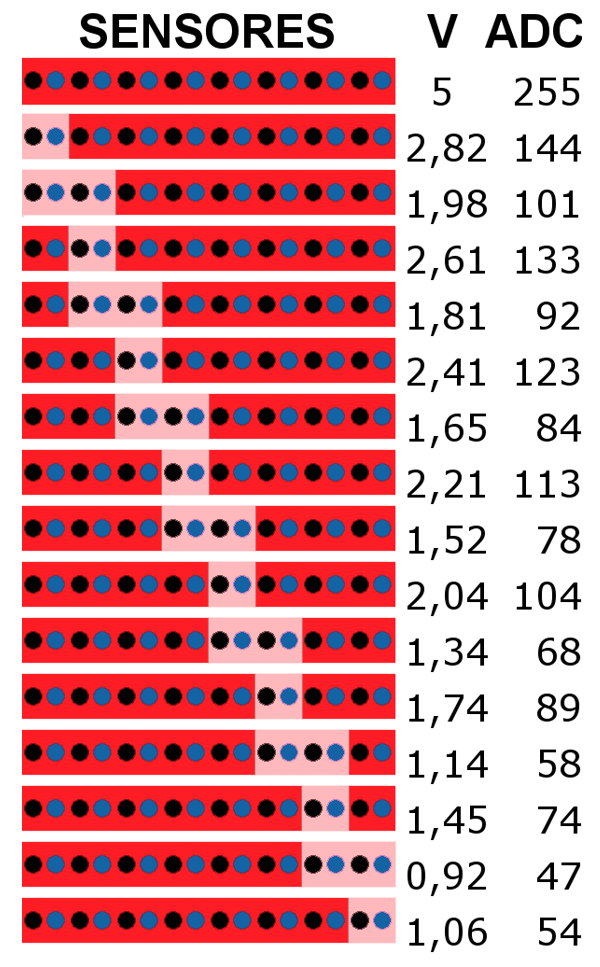
Con esta combinatoria, para conocer las variaciones debemos multiplicar el número de sensores por 2. En total tenemos 16 mediciones posibles (y diferentes) para todos los estados en que pueden estar los sensores.
He aquí un esquema con los distintos estados, el voltaje resultante (según una simulación) y el valor del ADC llevado a 8 bits:
Para un robot de Sumo ya no vale el cálculo anterior, ya que habría 7 combinaciones posibles de sus 4 sensores, y el fondo es negro con una línea blanca:

Ahora sólo queda medir una primera vez los diferentes valores de los sensores, y luego programar en nuestro microcontrolador una tabla con esos valores, para utilizar luego en las comparaciones del programa. Esta lista de valores servirá para siempre. Por supuesto, como los valores de los resistores tienen un margen de error, y la caída de tensión sobre los diodos no suele ser siempre el mismo, sólo podremos hablar de valores orientativos y únicamente podemos obtener los valores correctos midiéndolos directamente con un tester, o conectando el circuito al microcontrolador y que éste nos los informe a través del puerto COM y un monitor serie.