Como material genético, el ADN es responsable de toda la vida conocida. Pero el ADN también es un polímero. Aprovechando la naturaleza única de la molécula, los ingenieros de Cornell han creado máquinas simples construidas con biomateriales con propiedades de seres vivos.

Con el uso de lo que denominan materiales DASH (DNA-based Assembly and Synthesis of Hierarchical materials, Ensamblaje y Síntesis de Jerarquías a base de ADN), los ingenieros de Cornell construyeron un material de ADN con capacidades de metabolismo, además del autoensamblaje y la organización, tres características clave de la vida.
“Estamos introduciendo un concepto de material completamente nuevo y realista impulsado por su propio metabolismo artificial”. «No estamos haciendo algo que está vivo, pero estamos creando materiales que son mucho más reales que nunca se han visto antes», dijo Dan Luo, profesor de ingeniería biológica y ambiental en la Facultad de Agricultura y Ciencias de la Vida.
El artículo es «Material de ADN dinámico con comportamiento de locomoción emergente impulsado por el metabolismo artificial» (Dynamic DNA material with emergent locomotion behavior powered by artificial metabolism), publicado el 10 de abril en Science Robotics.
Para que cualquier organismo vivo se mantenga, debe haber un sistema para gestionar el cambio. Se deben generar nuevas células; Las células viejas y los desechos deben ser barridos. La biosíntesis y la biodegradación son elementos clave de la autosostenibilidad y requieren metabolismo para mantener su forma y funciones.
A través de este sistema, las moléculas de ADN se sintetizan y ensamblan en patrones de manera jerárquica, lo que resulta en algo que puede perpetuar un proceso dinámico y autónomo de crecimiento y decadencia.
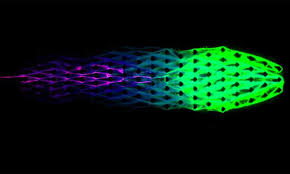
Usando DASH, los ingenieros de Cornell crearon un biomaterial que puede emerger de forma autónoma de sus bloques de construcción a nanoescala y organizarse por sí mismo, primero en polímeros y finalmente en formas de mesoescala (componentes en un rango de aproximadamente 0,1 mm a 5 mm). Partiendo de una secuencia de semillas de 55 nucleótidos, las moléculas de ADN se multiplicaron cientos de miles de veces, creando cadenas de ADN de repetición de unos pocos milímetros de tamaño. La solución de reacción se inyectó luego en un dispositivo microfluídico que proporcionaba un flujo de energía líquida y los componentes básicos necesarios para la biosíntesis.
A medida que el flujo invadía el material, el ADN sintetizaba sus propias nuevas hebras, con el extremo frontal del material creciendo y el extremo de la cola degradándose en un equilibrio optimizado. De esta manera, hizo su propia locomoción, avanzando lentamente, contra el flujo, de manera similar a como se mueve el moho mucilaginoso.
La habilidad de locomoción permitió a los investigadores enfrentar grupos del material entre sí en carreras competitivas. Debido a la aleatoriedad en el entorno, un cuerpo eventualmente obtendría una ventaja sobre el otro, permitiendo que uno cruzara primero una línea de meta.
“Los diseños siguen siendo primitivos, pero mostraron una nueva ruta para crear máquinas dinámicas a partir de biomoléculas. Estamos en un primer paso en la construcción de robots reales mediante el metabolismo artificial”, dijo Shogo Hamada, profesor e investigador asociado en el laboratorio de Luo, y autor principal y coautor del artículo. “Incluso a partir de un diseño simple, pudimos crear comportamientos sofisticados como las competencias. El metabolismo artificial podría abrir una nueva frontera en robótica».
Actualmente, los ingenieros están explorando formas para que el material reconozca los estímulos y puedan buscarlos de manera autónoma en el caso de la luz o los alimentos, o evitarlos si son dañinos.
El metabolismo programado incrustado en los materiales de ADN es la innovación clave. El ADN contiene el conjunto de instrucciones para el metabolismo y la regeneración autónoma. Después de eso, es por su cuenta.
“Todo, desde su capacidad para moverse y competir, todos esos procesos son independientes. No hay interferencia externa «, dijo Luo. “La vida comenzó miles de millones de años a partir de unos pocos tipos de moléculas. Esto podría ser lo mismo».
El material que el equipo creó puede durar dos ciclos de síntesis y degradación antes de que caduque. Según los investigadores, es probable que la longevidad se extienda, lo que abre la posibilidad de más «generaciones» de material a medida que se auto-replica. «En última instancia, el sistema puede llevar a máquinas auto-reproductivas realistas», dijo Hamada.
«Más emocionante, el uso del ADN le da a todo el sistema una posibilidad de auto-evolución», dijo Luo. «Eso es enorme».
Teóricamente, podría diseñarse para que las generaciones subsiguientes surjan en segundos. Según Luo, la reproducción a este ritmo acelerado aprovecharía las propiedades de mutación naturales del ADN y aceleraría el proceso evolutivo.
En el futuro, el sistema podría usarse como un biosensor para detectar la presencia de cualquier ADN y ARN. El concepto también podría usarse para crear una plantilla dinámica para hacer proteínas sin células vivas.
El trabajo fue financiado en parte por la National Science Foundation y apoyado por el Fondo de Ciencia y Tecnología de NanoEscala de Cornell y el Instituto Kavli en Cornell for Nanoscale Science. Entre los colaboradores se encuentran Jenny Sabin, la profesora de Arquitectura Arthur L. e Isabel B. Wiesenberger, y los investigadores forman la Universidad Jiaotong de Shanghai y la Academia China de Ciencias.
Hay una patente pendiente en el Centro de Licencias de Tecnología.