La CIAA es una plataforma electrónica preparada especialmente para aplicaciones industriales, cuyo diseño está disponible para ser usado libre y gratuitamente en el desarrollo de productos y servicios.
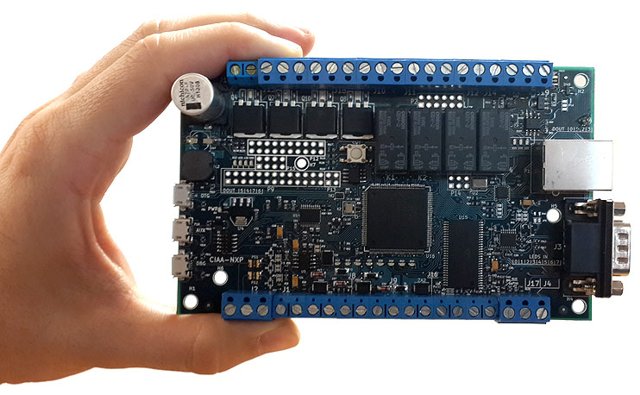
La CIAA nació a partir de una iniciativa de CADIEEL y la ACSE con el objetivo de promover el crecimiento de la industria nacional, y hoy es el resultado del trabajo colaborativo de decenas de empresas y universidades de la República Argentina.
Aplicaciones de la CIAA
La CIAA sirve para aplicaciones en agroindustria, industria automotriz, fábricas de alimentos, metal-mecánica, control de procesos químicos, máquinas textiles, etc., dónde se usan sistemas electrónicos para automatizar procesos, y está siendo adoptada en todo la República Argentina, gracias al trabajo de CADIEEL y el apoyo del Ministerio de Industria y del Ministerio de Ciencia, Tecnología e Innovación Productiva.
ACSE También es ideal para la enseñanza en escuelas técnicas, terciarios y universidades, y se está utilizando en cientos de cursos a lo largo y ancho de nuestro país, a partir de la tarea de la ACSE y el apoyo del Ministerio de Educación.
Sigue leyendo →