Muchas de las señales que ingresan a un sistema digital, que provienen del mundo real y que por eso en pocas ocasiones se pueden considerar «binarias» (digital «0 y 1», «Sí y No», «valor» o «no valor»), son en su mayoría lecturas analógicas.
Si bien los microcontroladores incluyen entradas para señales analógicas, a veces no alcanza la precisión de lectura que poseen, o no alcanza la cantidad de entradas disponibles, y para esto necesitamos elementos auxiliares que nos ayuden a direccionarlas y leerlas, como los que presento aquí.
Convertidor analógico a digital ADS1115
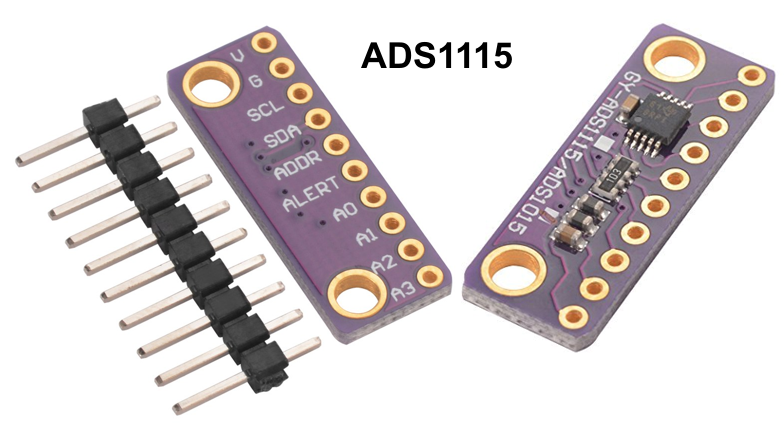
Para los microcontroladores sin convertidor analógico a digital o cuando se quiere un ADC de mayor precisión, el ADS1115 proporciona una precisión de 16 bits a 860 muestras/segundo sobre I2C. El chip se puede configurar como 4 canales de entrada de un solo extremo, o dos canales diferenciales. Como una buena ventaja, incluso incluye un amplificador de ganancia programable, hasta X16, para ayudar a aumentar las señales individuales / diferenciales más pequeñas al rango completo. El ADC puede funcionar de 2 V a 5 V de alimentación lógica, puede medir un amplio rango de señales y es súper fácil de usar. Es un gran convertidor de 16 bits de propósito general.
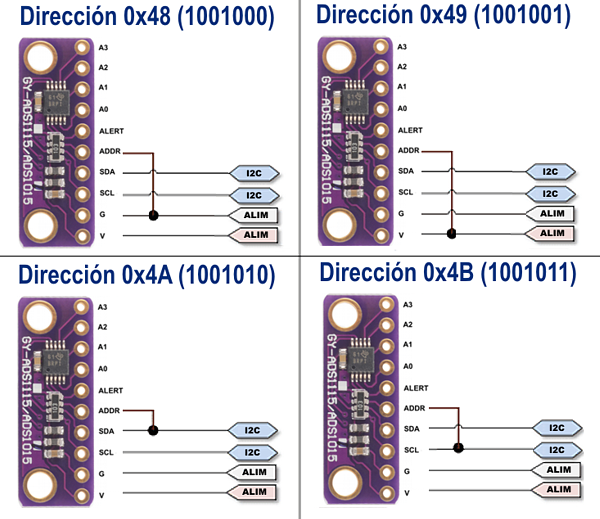
La interconexión se realiza a través de la interfaz I2C. La dirección se puede cambiar a una de cuatro opciones para que pueda tener hasta 4 ADS1115 conectados en un solo bus I2C de 2 hilos para 16 entradas de terminación simple.
Especificaciones técnicas
Amplio rango de alimentación: 2,0V a 5,5V
Consumo de corriente bajo: Modo continuo: solo 150μA
Modo de disparo único: apagado automático
Tasas de datos programables: 8 SPS a 860 SPS (SPS = senseos por segundo)
Referencia interna de baja tensión de deriva interna: Sí
Oscilador interno: Sí
PGA incorporado: Sí (PGA = Amplificador de Ganancia Programable)
INTERFAZ I2C: Direcciones seleccionables por pines
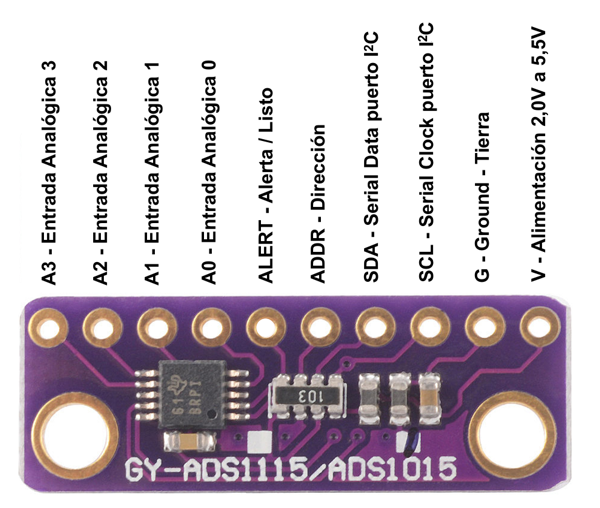
Número de entradas analógicas: 4 simples o 2 Diferenciales
Comparador programable
Direcciones I2C: direcciones de bits entre 0x48-0x4B, seleccionables con puentes
Dimensiones mecánicas: 26.0 mm (L) x 9.4 mm (W) x 2.2 mm (H)
Separación de los pines: estándar 2,54 mm / 0,1 pulgada
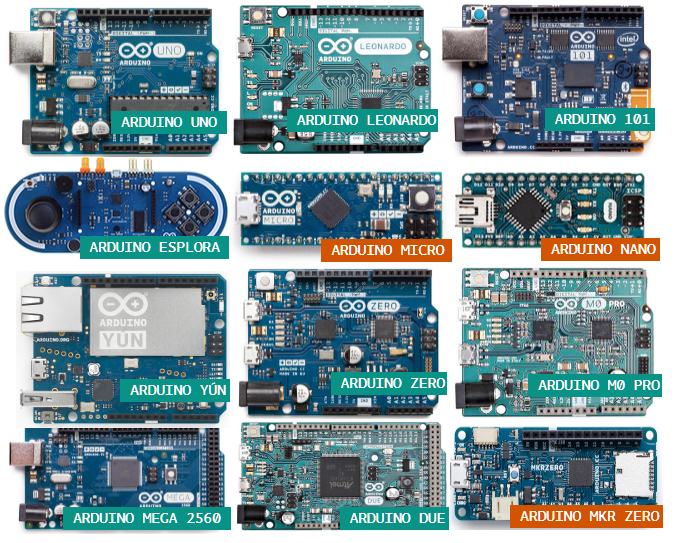
Compatible con:
Placas Arduino como UNO, MEGA2560, DUE, Leonardo, Pro-mini, Pro-Micro, Nano, etc.
Raspberry Pi
ESP32, ESP8266, NodeMCU, WeMOS,
Microcontroladores PIC32, STM8, STM32, AVR, ATMEGA
Documentos y descargas:
ADS1115 Hoja de datos
ADS1115 Librería Python
ADS1115 Librería Arduino
ADS1115 Tutorial (Módulo similar, en breve publicaré nuestro propio tutorial)
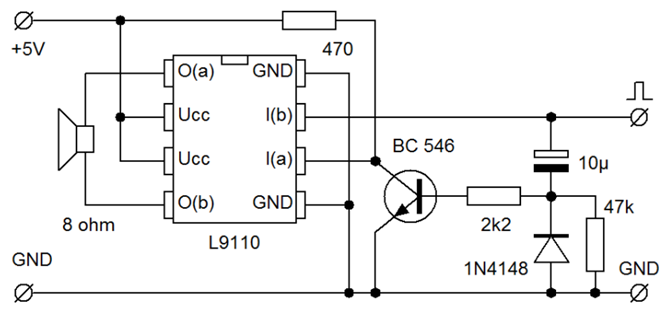
Circuito típico

Conexiones
Selector analógico bidireccional CD74HC4067

Selector analógico bidireccional (multiplexor / demultiplexor) de 16 canales. Funciona como direccionador de 16 entradas analógicas a 1 vía de salida, o como 1 entrada analógica a 16 vías de salida.
Opera con alimentación entre 1,2 a 6 V.
Controla voltajes analógicos dentro del rango entre cero y el voltaje de alimentación.
Al ser bidireccionales permiten que las señales analógicas controladas sean, indistintamente, entradas o salidas. Estos selectores tienen baja resistencia al estar en estado de conducción, y alta resistencia al estar cerrados.
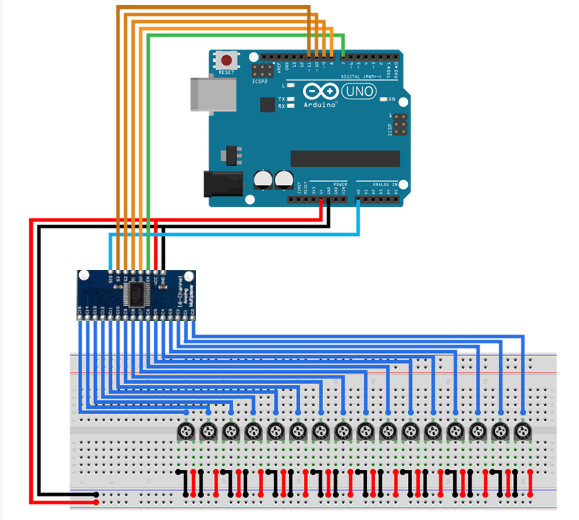
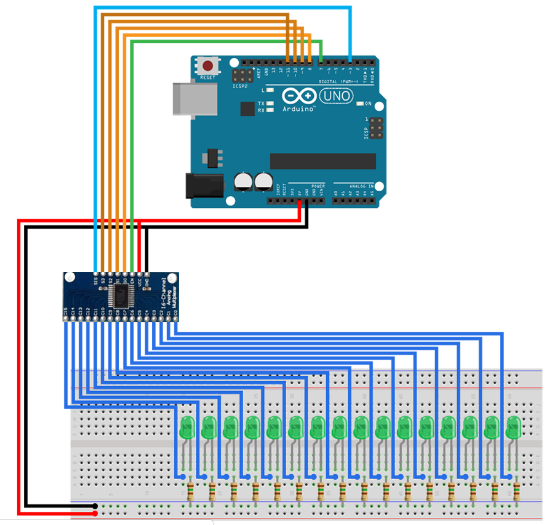
Ejemplos
Múltiples señales analógicas dirigidas a una entrada del microcontrolador
Múltiples Led controlados desde un único pin digital del microcontrolador
Hoja de datos:
CD74HC4067: http://www.ti.com/lit/ds/symlink/cd74hc4067.pdf