
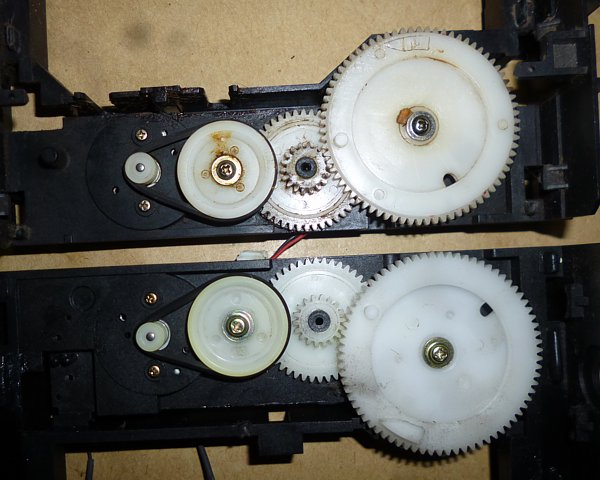
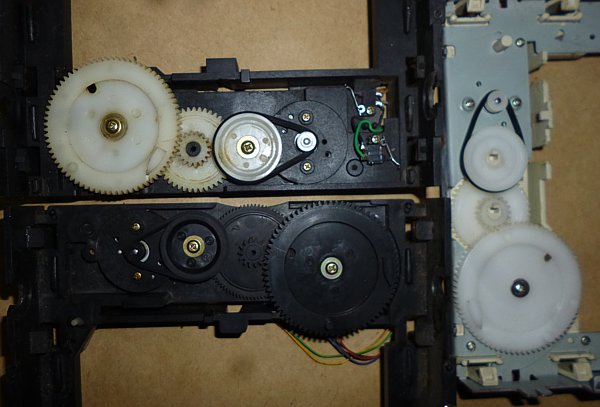
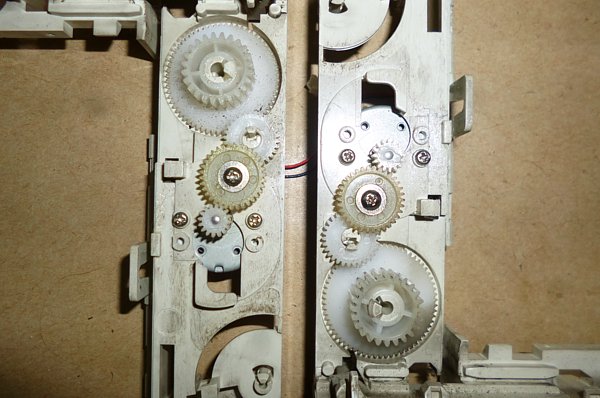
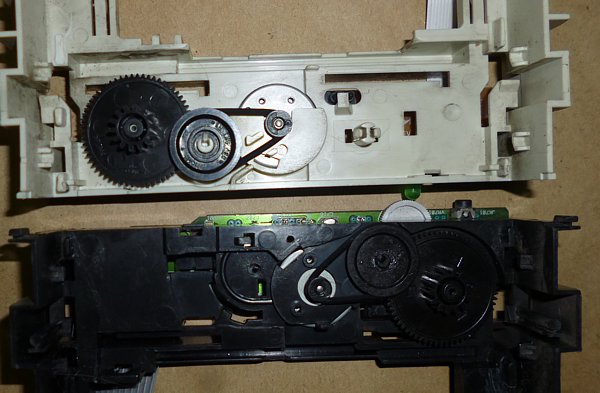
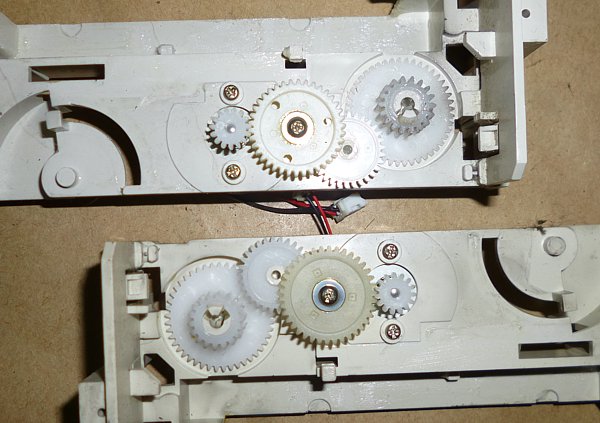
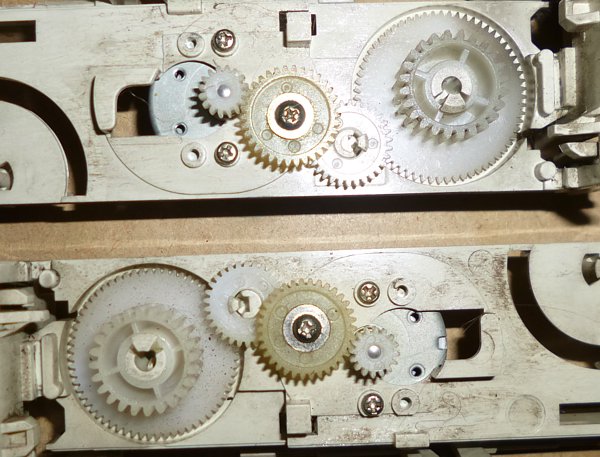
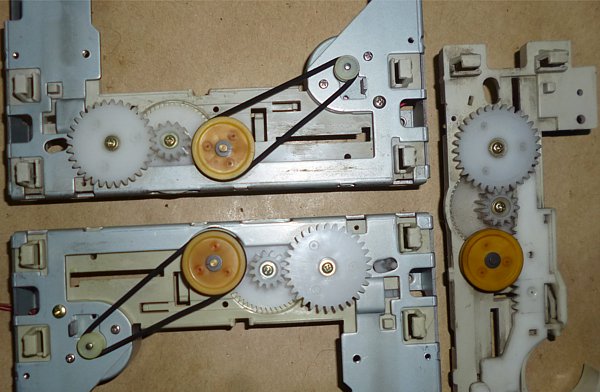
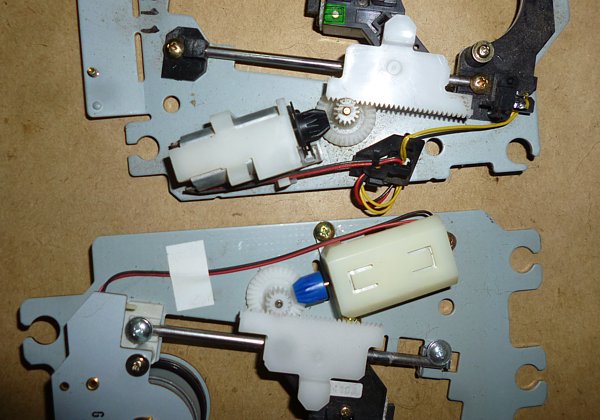
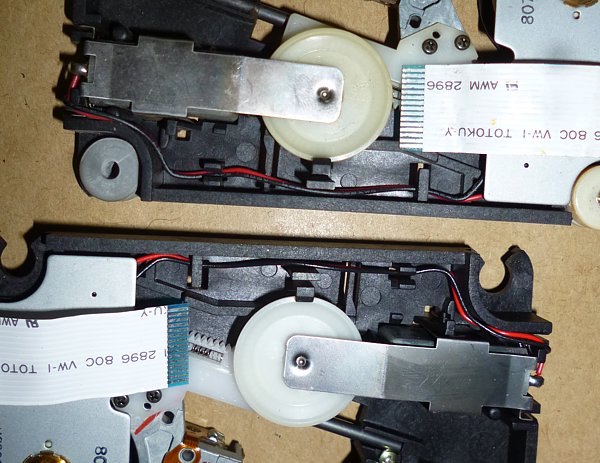
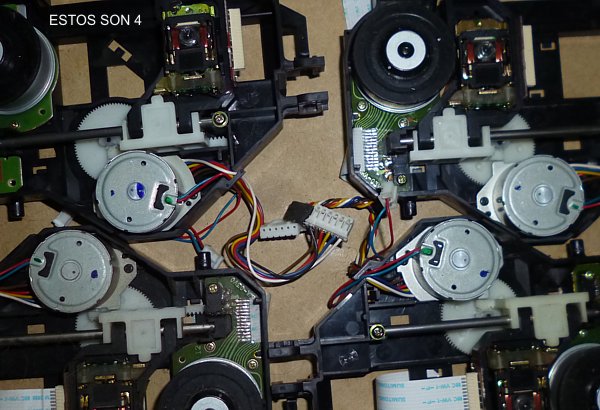
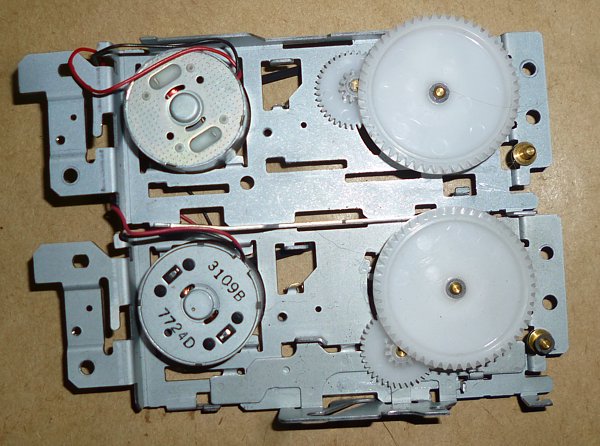
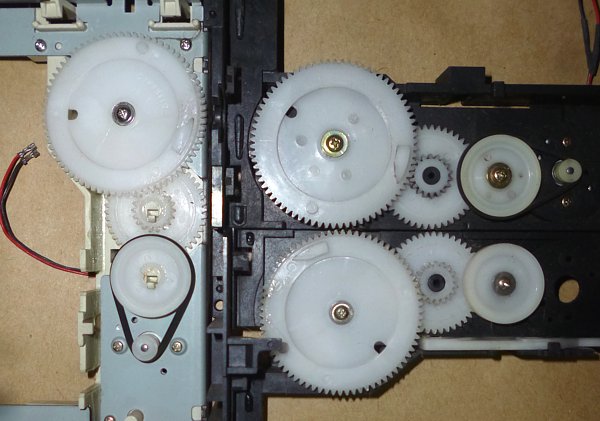
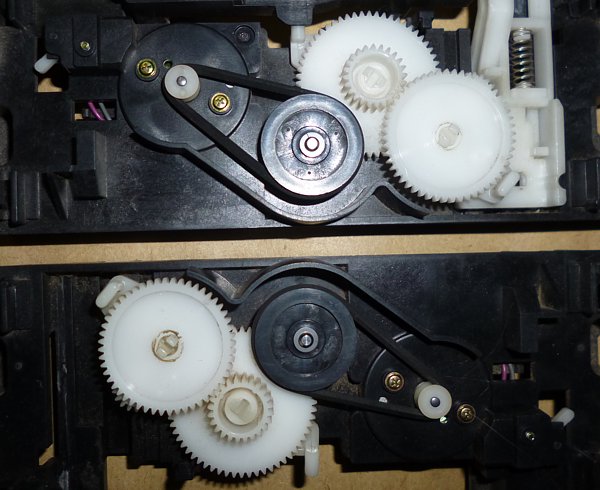
Habiendo desarmado más de 100 unidades de CD, y creo que ya no quedan más de las que tenía de haber comprado en remates y algunas donadas, estos son los juegos que logré armar, la mayoría de 2 iguales (que es lo que hace falta en los robots, dos motores y juego de engranajes apareados en cada uno), algunos en tríos y un cuarteto. Como se puede observar en las imágenes, la variedad de diseños es importante.
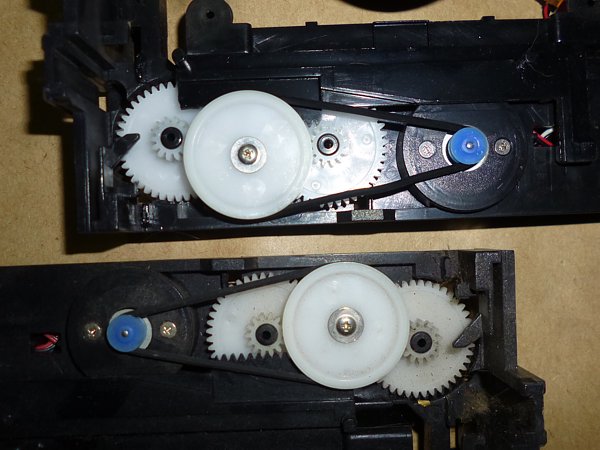
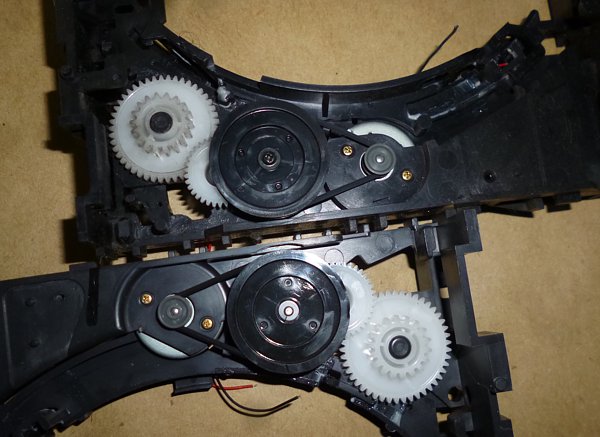
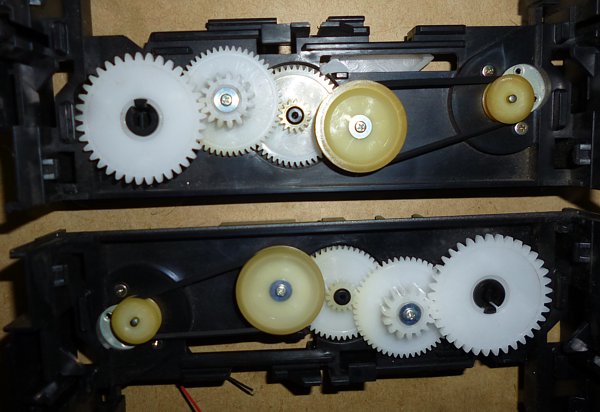
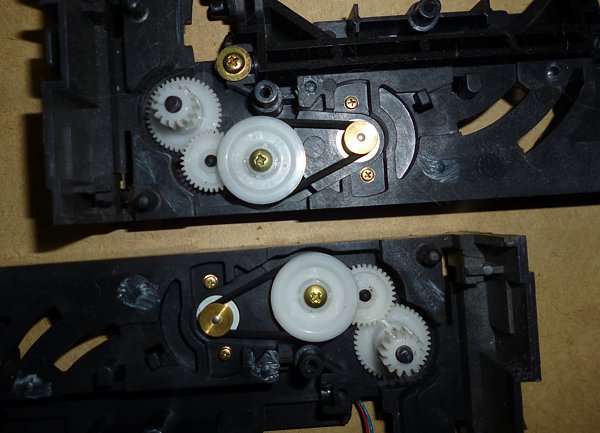
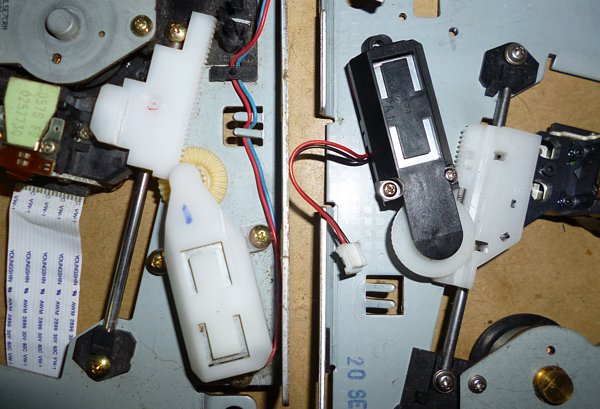
Algunos mecanismos son los de sacar afuera y entrar la bandeja de la unidad, y otros (se puede notar en la imagen) son los que mueven los cabezales. En algunos casos no existe una igualdad total, si bien dentro de estos juegos los mecanismos que elegí son muy parecidos entre sí.
También hay que ver la respuesta de los motores, del estado de los ejes, y del diseño mecánico en general, que a pesar de parecer iguales puede causar que las ruedas giren a diferentes velocidades. También ocurre que quizás el esfuerzo mecánico no sea igual cuando el mecanismo gira hacia un sentido a cuando gira en el otro. Y hay que ver que estos mecanismos no fueron pensados para un uso muy continuado. En la vida de una unidad de CD no son tantas las veces que sale y entra la bandeja. Posiblemente los mecanismos de cabezal sí sean más resistentes al uso continuo que se le dará en un robot, ya que la cantidad de movimientos de ese sistema es mucho mayor comparado con la carga y descarga de un disco.

Me falta comparar algunos mecanismos más de los últimos desarmes, y puede ser que se formen algunos tríos más. Y quizás algunos pares, aunque ya solamente a ojo creo que ya no quedan muchas posibilidades de apareamiento.
Todavía falta mucho para que esto se convierta en robots. Hay que conseguir unir las ruedas a los engranajes de salida, sea con un enganche directo, sea a través de engranajes que tenga el mismo paso de diente que el engranaje de salida. Hay que tener en cuenta que para mantener una igualdad de deslizamiento en el robot (velocidad de marcha) con la velocidad a la que sale o entra la bandeja en una unidad de CD, que parece muy aceptable, el engranaje que enganche con el de salida debe tener la misma cantidad de dientes que éste.
Luego de eso viene la cuestión del manejo de potencia en DC, con posibilidad de reversa. Para sacarlo del desarme hay que estudiar muchos chips y transistores, y si en lugar de chips ya capaces de mover el motor, se trata de circuitos con transistores, hay que trabajar bastante en el armado de circuitos.

A continuación hay que conseguir los microprocesadores y sus zócalos. Las plaquetas de base para el armado de los circuitos. Los portapilas. La tercera rueda de apoyo, o «rueda loca». Y luego sensores, al menos sensores de choque, con antenas metálicas, aunque me gustaría tener mis módulos de sensores de reflexión de infrarrojos a tiempo.
Toda una tarea…
es de 4 pilas (ya reemplazaré la foto cuando tenga mi primer prototipo de ejemplo)

Pingback: Mecánica del robot didáctico: ruedas principales (1) | Robots Didácticos
Pingback: Componentes del robot didáctico – Automatismos Mar del Plata