Cada robot básico requiere dos motores, uno en cada rueda lateral. Los motores deben ser eléctrica y mecánicamente iguales, en primer lugar por cuestiones de simetría de montaje en el chassis y por la distribución equilibrada de peso, y también por la movilidad correcta durante el funcionamiento, de tal modo que al darle avance el robot no se mueva en trayectoria curva cuando debe seguir una recta
Se observan aquí unidades de CD-ROM desarmadas en la mesa familiar, a la búsqueda de motores para construir una tanda de robots totalmente armados con partes rescatadas. REQUISITO: conseguir un par de motor y sistema de engranaje idénticos para cada robot Por razones de montaje, robustez, simetría y sencillez, el sistema IDEAL es este. Es de la parte de desplazamiento del cabezal en una unidad de CD-ROM. Pertenece a las unidades de CD-ROM más modernas
Por razones de montaje, robustez, simetría y sencillez, el sistema IDEAL es este. Es de la parte de desplazamiento del cabezal en una unidad de CD-ROM. Pertenece a las unidades de CD-ROM más modernas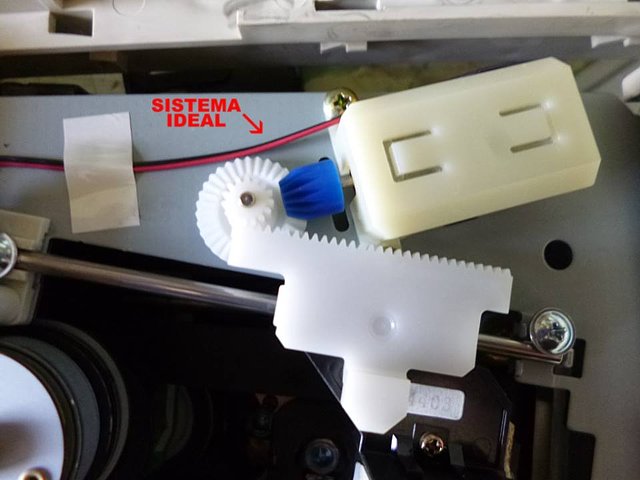
Este otro sistema también es utilizable, formado por entero de engranajes. Pertenece al mecanismo de desplazamiento hacia afuera y adentro de la bandeja del disco en una unidad de CD-ROM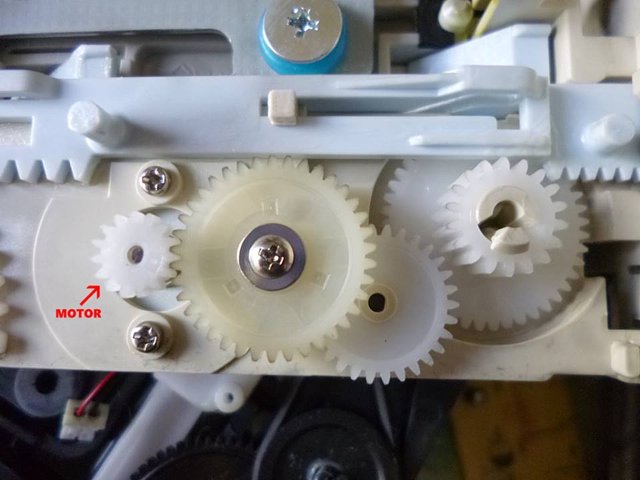 Este sistema de desplazamiento de la bandeja del disco en una unidad de CD-ROM no es conveniente, debido a que tiene la transmisión de giro del motor por correa de goma. En esta imagen se nota que la correa ya tiene una deformación, debida a su posición fija durante mucho tiempo sobre la polea del motor. Además, la goma sufre un envejecimiento químico y se hace quebradiza, además de estirarse. Y sería difícil tener repuestos para estas correas. También encontramos, en diferentes unidades, muchos mecanismos con correa todos con diseños distintos
Este sistema de desplazamiento de la bandeja del disco en una unidad de CD-ROM no es conveniente, debido a que tiene la transmisión de giro del motor por correa de goma. En esta imagen se nota que la correa ya tiene una deformación, debida a su posición fija durante mucho tiempo sobre la polea del motor. Además, la goma sufre un envejecimiento químico y se hace quebradiza, además de estirarse. Y sería difícil tener repuestos para estas correas. También encontramos, en diferentes unidades, muchos mecanismos con correa todos con diseños distintos

Pingback: Mecánica del robot didáctico – Automatismos Mar del Plata