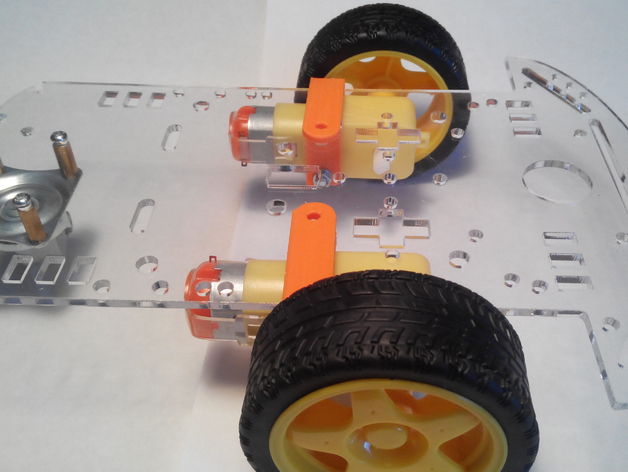
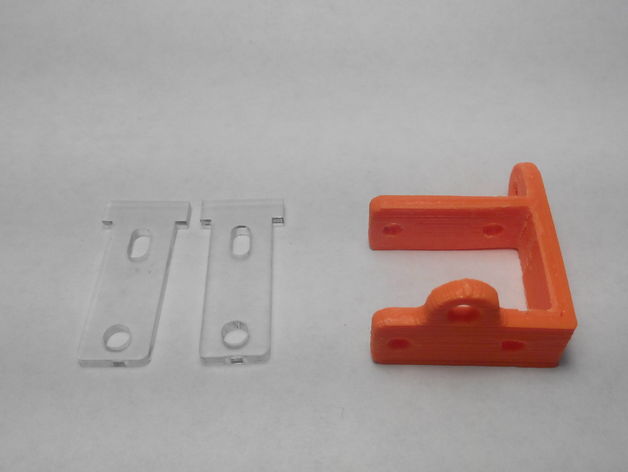
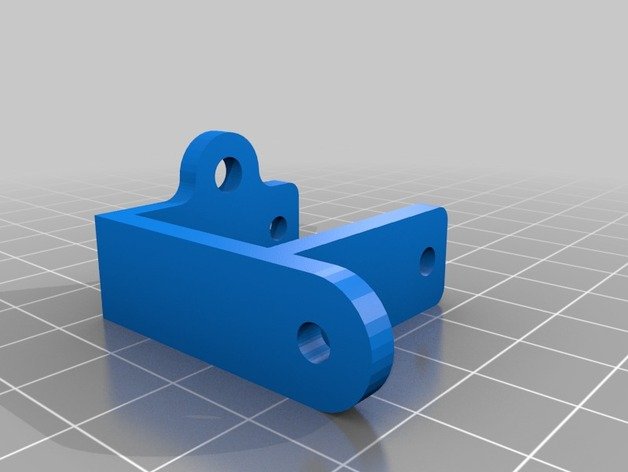
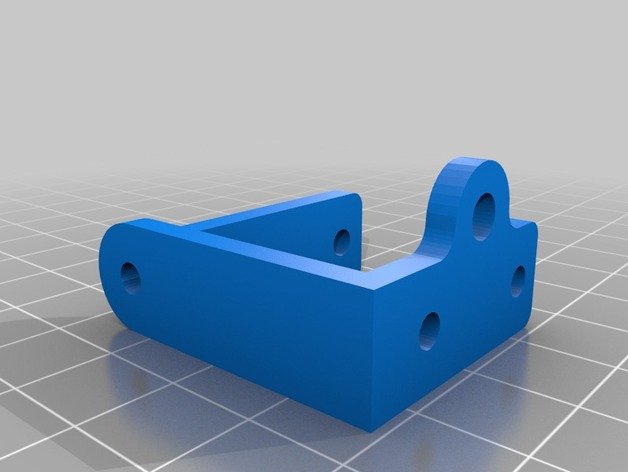
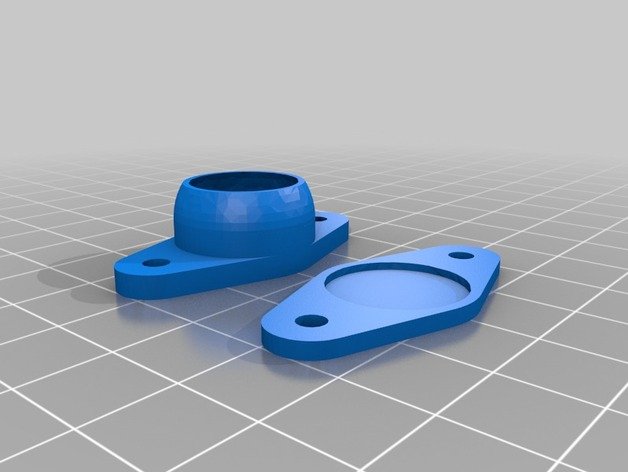
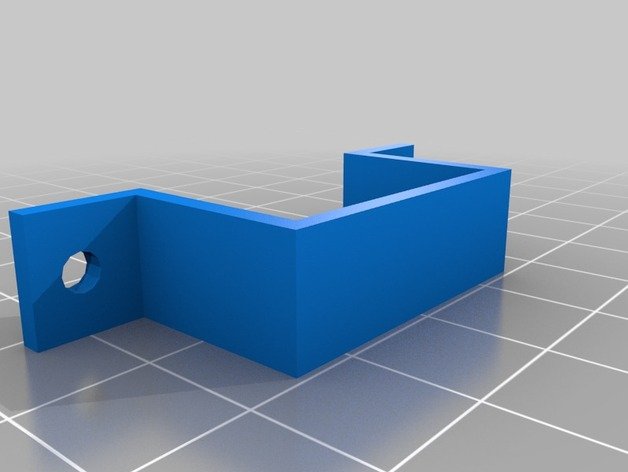
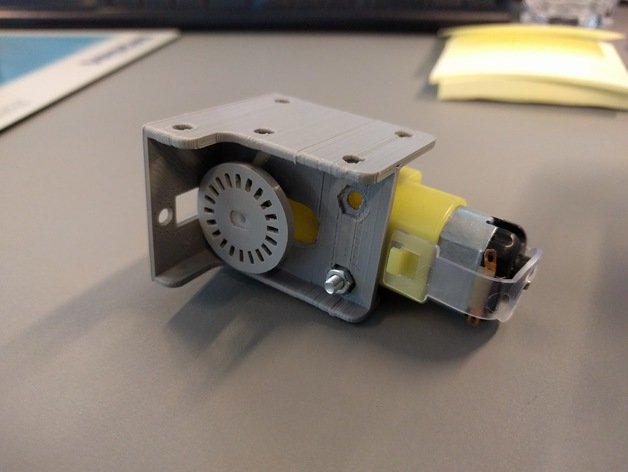
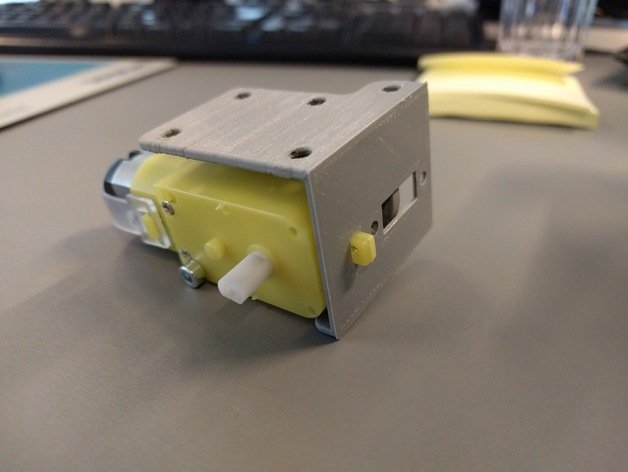
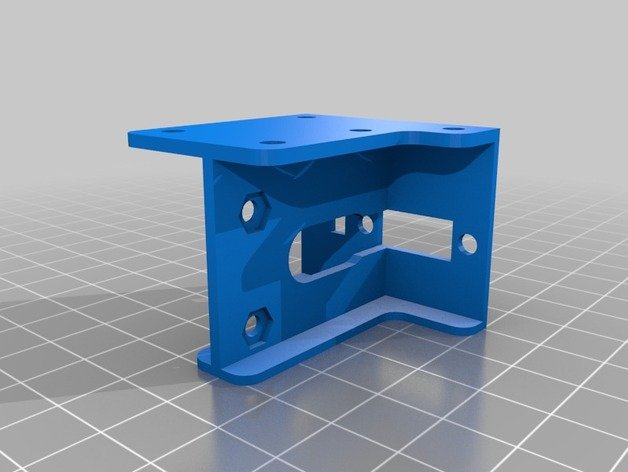
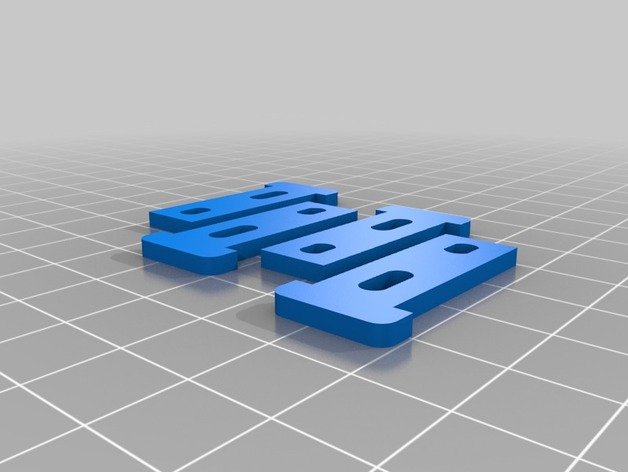
Soporte de motores, por zi3d
https://www.thingiverse.com/thing:750963
Enlaces para archivos de impresión
https://www.thingiverse.com/thing:750963/zip
Este soporte permite fijar los motores estándar de los kits más comunes con más firmeza, sin fijaciones que se rompen con facilidad, y sobre cualquier placa base del material que usted desee, sin necesidad de comprar las cortadas con láser.

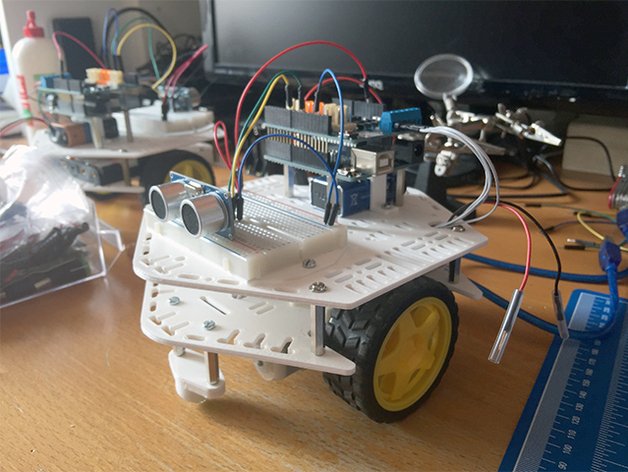
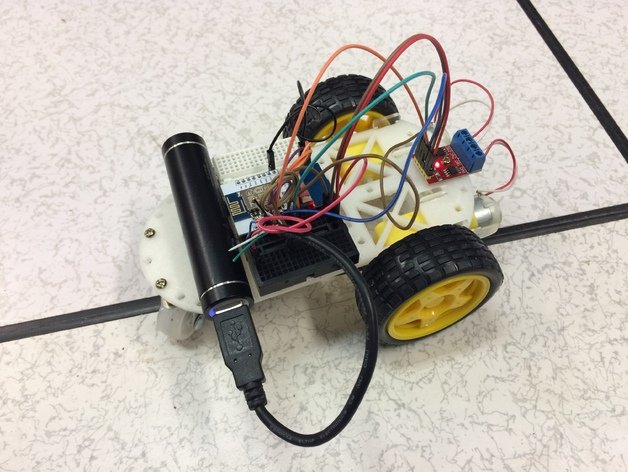
DotBot por Dotbot-io
https://www.thingiverse.com/thing:1441937
Enlaces para archivos de impresión
https://www.thingiverse.com/thing:1441937/zip
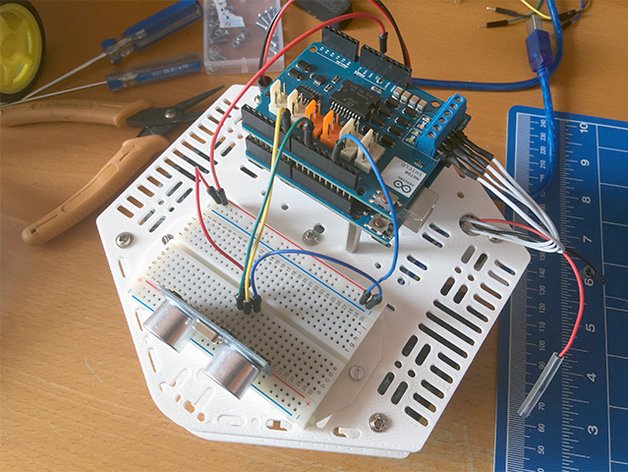

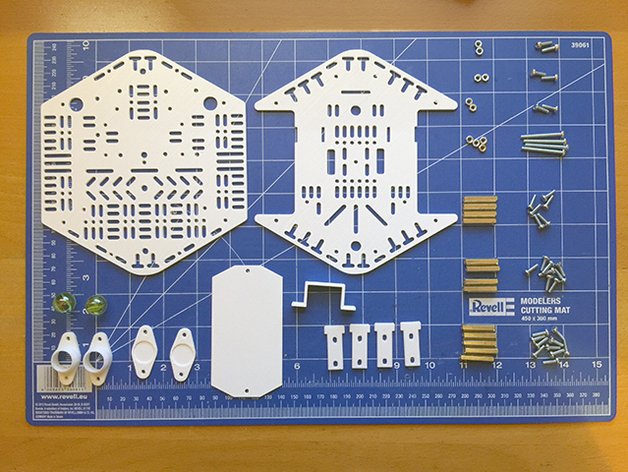

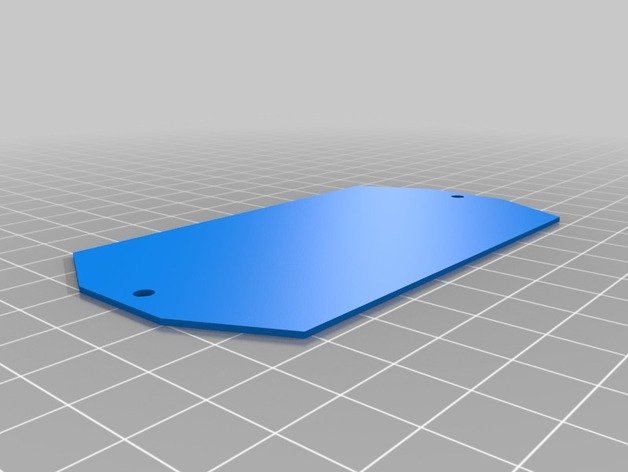
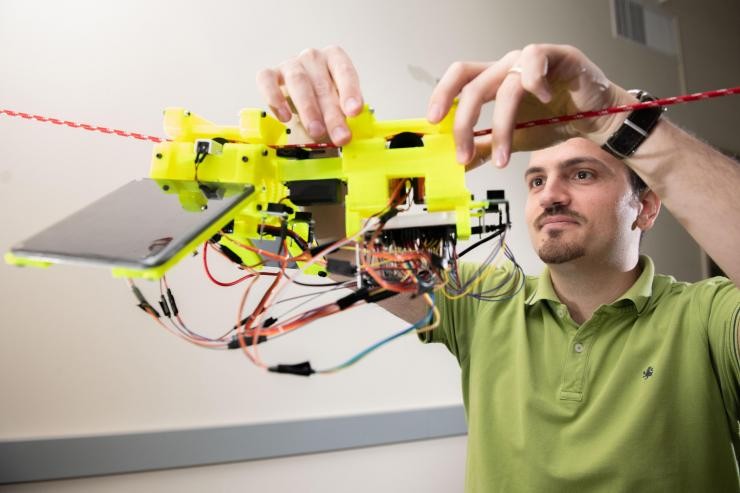
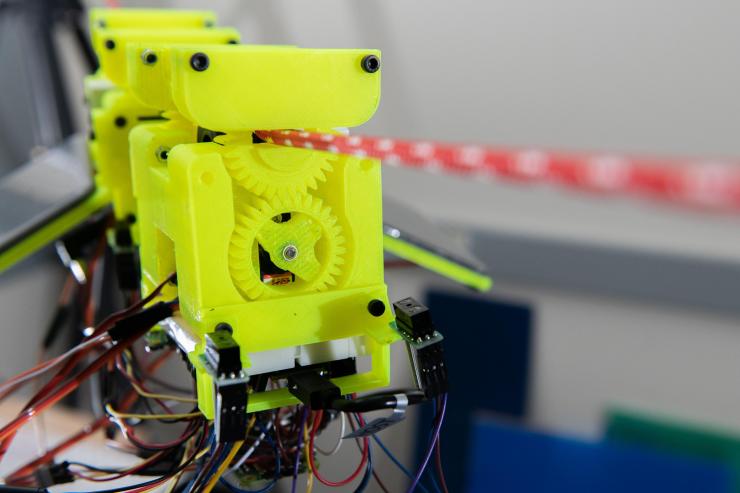
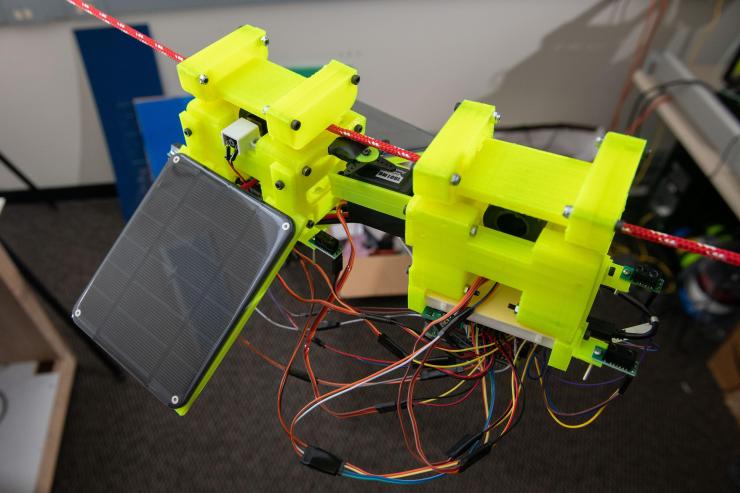
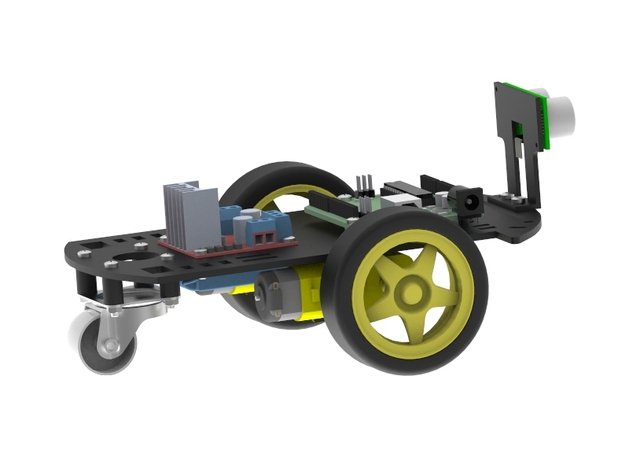
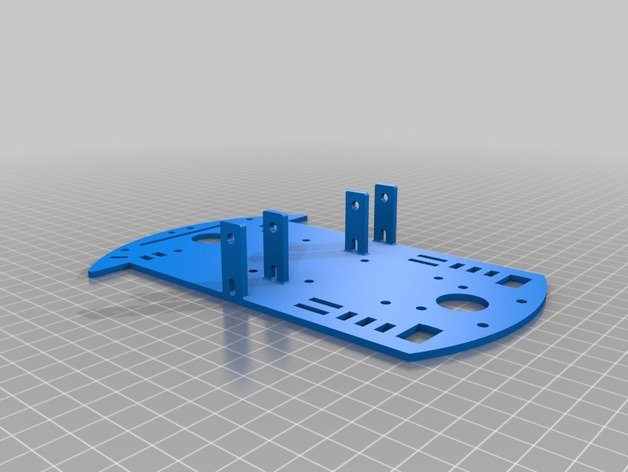
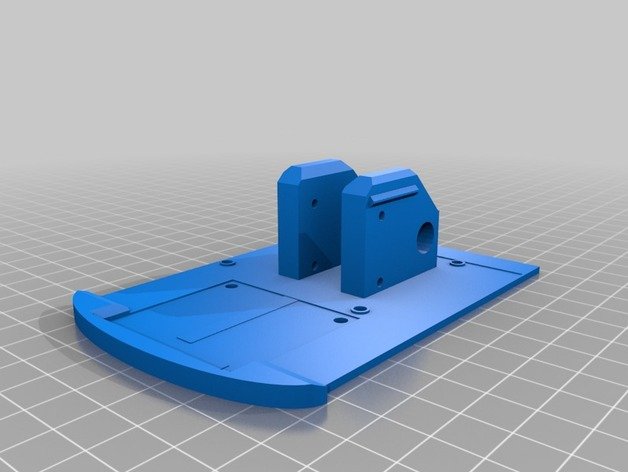
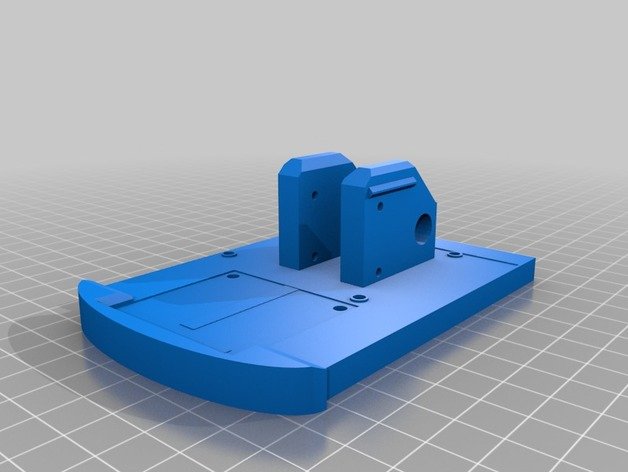
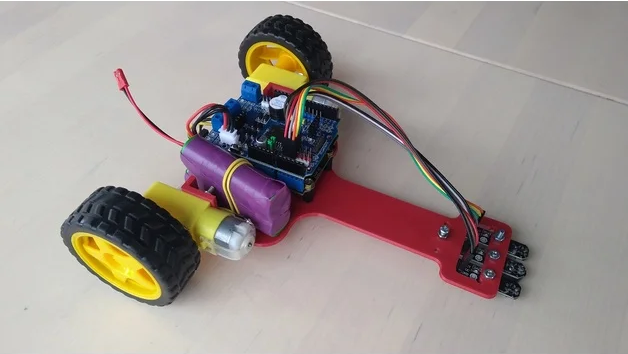
Chassis para robot por metshein
https://www.thingiverse.com/thing:1011890
Enlaces para archivos de impresión
https://www.thingiverse.com/thing:1011890/zip
![]()
![]()
Chassis compacto por makerhacks
https://www.thingiverse.com/thing:2320298
Enlaces para los archivos (distintos modelos)
https://www.thingiverse.com/thing:2320298/zip

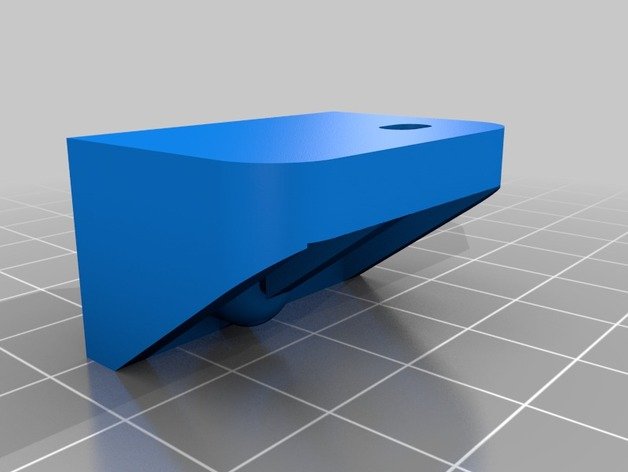
Montaje para motor con tacómetro por b2vn
https://www.thingiverse.com/thing:1473508
Archivos para impresión 3D
https://www.thingiverse.com/thing:1473508/zip


Montaje para motor, ruedas y orugas por edwardchew
https://www.thingiverse.com/thing:3228395
https://www.thingiverse.com/thing:3228359
Descargar todos los archivos para chassis y ruedas https://www.thingiverse.com/thing:3228395/zip
Descargar todos los archivos para orugas https://www.thingiverse.com/thing:3228359/zip






Chassis para robot por Malathar
https://www.thingiverse.com/thing:1316755
Enlaces de los archivos para impresión 3D
https://www.thingiverse.com/thing:1316755/zip



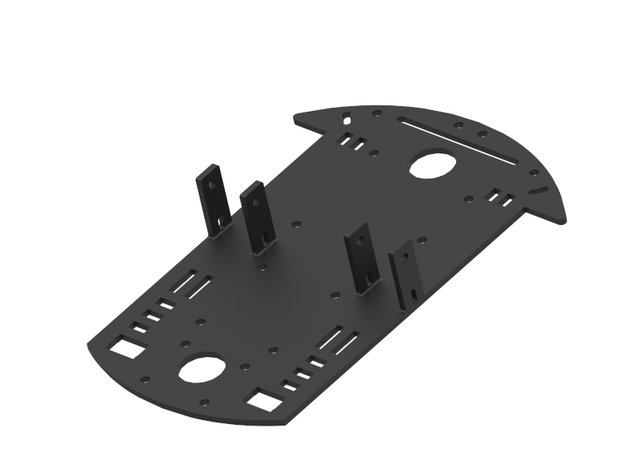
Seguidor de línea JJ1 por AndrewLinden
https://www.thingiverse.com/thing:2831729
Enlace para los archivos de impresión 3D
https://www.thingiverse.com/thing:2831729/zip
Es un chasis de robot para construir un robot seguidor de línea utilizando los motores amarillos de engranajes y un Arduino.


En lugar de los tres módulos de sensor de línea, también puede usar un conjunto de sensores de 8 canales.
El chasis tiene agujeros para esta placa de sensores también. Esta matriz tiene salida analógica y necesitas un Arduino Nano que posee pines adicionales A6 y A7 usar los 8 canales del sensor, que tiene salida analógica. También puede optar por agregar al Arduino uno un CD74HC4067, multiplexador de 16 canales.
Cuando use paquetes de batería LiPo sin protección, también debe usar un sensor de bateria Lipo con beeper como el de la imagen que sigue, o una protección similar.

Utilice un tornillo de cabeza redonda en uno de los orificios frontales. La parte frontal del robot se deslizará sobre ese tornillo.
Por supuesto, se pueden encontrar varios diseños más en el repositorio de diseños 3D https://www.thingiverse.com/