
Robótica
La nueva revolución china: de la mano de obra barata a la mano de obra robótica
Los sueldos han aumentado y ya no son competitivos a nivel global. El país está haciendo grandes inversiones para sustituir a millones de trabajadores por robots, pero ¿qué será de ellos?

Dentro de una gran sala sin ventanas en una fábrica de electrónica al sur de Shanghái (China), unos 15 trabajadores contemplan un pequeño brazo robótico con frustración. Cerca del final de la línea de producción, donde unos equipos ópticos de red están siendo introducidos en cajas para su envío, el robot permanece inmóvil.
«El sistema se ha caído», explica la responsable del control de calidad, Nie Juan, una mujer de veintipocos años. Su equipo lleva probando el robot durante la última semana. La máquina está encargada de colocar pegatinas en las cajas que contienen enrutadores nuevos, y parecía haber dominado la tarea bastante bien. Pero entonces dejó de funcionar de repente. «El robot sí ahorra mano de obra, pero resulta difícil de mantener», me cuenta Nie con el ceño fruncido.
Esta complicación refleja el gran reto tecnológico al que se enfrentan actualmente los fabricantes chinos. Los sueldos en Shanghái han aumentado en más del doble durante los últimos siete años. Así que la empresa propietaria de la fábrica, Cambridge Industries Group (CIG), se enfrenta a una feroz competencia por parte de unas operaciones cada vez más tecnológicamente avanzadas en Alemania, Japón y Estados Unidos. Para abordar ambos problemas, CIG quiere reemplazar dos terceras partes de su plantilla con máquinas este año. Dentro de un par de años más, quiere que la operación se ejecute de forma prácticamente automatizada. De lograrlo, CIG conseguiría crear lo que se define como una «fábrica oscura» o «de luces apagadas». La idea es que con tan pocas personas presentes, se podrían apagar las luces y dejar las máquinas trabajar a sus anchas.
Pero como sugiere el inactivo brazo robótico de la línea de embalaje de CIG, reemplazar humanos con máquinas no es tarea fácil. La mayoría de los robots industriales requieren programación en detalle, y solo realizarán una tarea correctamente si las cosas están perfectamente posicionadas. Gran parte de los trabajos que se realizan en fábricas chinas requieren destreza manual, flexibilidad y sentido común. Si una caja baja por la línea en un ángulo raro, por ejemplo, un trabajador tendrá que ajustar la posición de su mano antes de pegar la etiqueta. Varias horas después, al mismo trabajador se le podría encargar fijar una etiqueta distinta en otro tipo de caja. Y el día siguiente podría ser trasladado a otra parte de la línea de producción.
A pesar de estos enormes retos, innumerables fabricantes de China planean transformar sus procesos de producción con el uso de la robótica y la automatización a una escala sin precedentes. De algún modo, en realidad no tienen otra opción. La mano de obra humana en China ya no es tan barata como lo fue antaño, especialmente en comparación con la de los centros de fabricación de crecimiento rápido rivales en Asia. En Vietnam, Tailandia e Indonesia, los salarios de las fábricas pueden representar menos de la tercera parte de lo que son en los centros urbanos de China. Muchos fabricantes y funcionarios del Gobierno creen que una solución consistiría en reemplazar los trabajadores humanos con máquinas.

Foto: El CEO de CIG, Gerald Wong, está desarrollando una fábrica de electrónica automatizada. Crédito: Daniele Mattioli.
Los resultados de este esfuerzo se sentirán a escala global. Casi la cuarta parte de los productos del mundo se fabrica en China. Si el país logra emplear robots y otras tecnologías avanzadas para reorganizar unos tipos de producción jamás automatizados con anterioridad, eso podría convertir el país, ahora la planta explotadora del mundo, en un centro de innovación tecnológica. Está menos claro, sin embargo, cómo afectaría esto a los millones de trabajadores reclutados por sus fábricas en auge.
Pero durante mi visita a la planta de CIG todavía había un buen número de trabajadores humanos. La recorrí junto a su CEO, Gerald Wong, un hombre compacto que obtuvo varios títulos del Instituto Tecnológico de Massachusetts (MIT, EEUU) durante la década de 1980. Observamos a un equipo de personas que realizaban delicados trabajos de soldadura en circuitos impresos, y otro grupo que introducía estos circuitos impresos en carcasas de plástico. Wong se paró para demostrar una tarea que les está resultando especialmente complicada de automatizar: la introducción de un cable flexible en los circuitos impresos. «Siempre se enroscan de manera distinta», explica con irritación.
Pero la fábrica de Wong sí está empezando a aplicar algunos impresionantes ejemplos de automatización. Mientras pasamos por una fila de máquinas que incrusta chips en circuitos impresos, un robot sobre ruedas aproximadamente del tamaño de una mininevera pasó por nuestro lado portando componentes en dirección contraria. Wong se puso delante de la máquina para demostrar cómo le detecta y se para.
En otra parte de la fábrica observamos un brazo robótico recogiendo circuitos impresos de una cinta transportadora y colocándolos dentro de una máquina que comprueba su software automáticamente. Wong explica que su empresa está probando un robot que realiza el trabajo de soldadura que observamos antes de forma más rápida y fiable que un humano.
Después de terminar la visita dijo: «Está muy claro en China: la gente se meterá en la automatización o se verá obligada a abandonar la fabricación«.
Automatizarse o morir
El milagro económico de China es directamente atribuible a su industria de fabricación. Aproximadamente 100 millones de personas trabajan en la fabricación en China (en Estados Unidos esta cifra ronda los 12 millones), y el sector representa casi el 36% de su PIB. Durante las últimas dos décadas, se han forjado imperios de fabricación en torno al delta del río Yangtze, la bahía Bohai (a las afueras de Pekín) y el delta del río de las Perlas al sur. Millones de trabajadores migratorios poco cualificados encontraron trabajo en fábricas gigantes produciendo un abanico inimaginable de productos, desde calcetines hasta servidores. China sólo representaba el 3% de la producción global de fabricación en 1990. Hoy, produce casi el 25%, incluido el 80% de todos los equipos de aire acondicionado, el 71% de todos los móviles y el 63% de todos los zapatos del mundo. Para los consumidores de todo el planeta, este auge de fabricación ha generado muchos productos de bajo coste, desde asequibles iPhones hasta televisores de pantalla plana.
En años recientes, sin embargo, el motor de fabricación chino ha empezado a calarse. Los salarios han aumentado al demoledor ritmo del 12% al año de media desde 2001. Las exportaciones chinas se redujeron el año pasado por primera vez desde la crisis financiera de 2009. Y hacia finales de 2015, el Índice para Gerentes de Compras Caixin, un indicador de uso generalizado para la actividad de fabricación, demostró que el sector se había contraído por décimo mes consecutivo. Al igual que el auge de fabricación de China alimentó la economía global, la perspectiva de su declive ya ha empezado a inquietar a los mercados financieros de todo el mundo.
Dentro de poco, CIG planea disponer de una fábrica mayoritariamente automatizada, un concepto conocido como «fábrica oscura» o «fabricas de luces apagadas».
La automatización parece ofrecer una solución tecnológica atractiva. China ya importa gran cantidad de robots industriales, pero el país está muy rezagado frente a sus rivales en cuanto al ratio de robots frente a trabajadores humanos. En Corea del Sur, por ejemplo, hay 478 robots por cada 10.000 trabajadores; en Japón esta cifra es de 315; en Alemania, 292; en Estados Unidos, 164. En China ese número es un pobre 36.
El Gobierno chino está ansioso por cambiar esto. El 16 de marzo, las autoridades aprobaron el próximo Plan a Cinco Años para la economía, del que se dice que incluye una iniciativa que pondrá miles de millones de yuanes a disposición de los fabricantes para mejorar sus tecnologías, incluidos robots y máquinas avanzadas. El Gobierno también tiene planes de crear docenas de centros de innovación por todo el país para servir de escaparate para las tecnologías avanzadas de fabricación. Algunas autoridades regionales han sido especialmente osadas. El año pasado el Gobierno de Guangdong, una provincia que aloja muchas grandes operaciones de fabricación, se comprometió a invertir 150.000 millones de dólares (unos 133.300 millones de euros) en equipar las fábricas con robots industriales y crear dos centros nuevos dedicados a la automatización avanzada.
El objetivo es superar a Alemania, Japón y Estados Unidos en términos de la sofisticación de la fabricación para 2049, el centenario de la República Popular de China. Para que esto suceda, el Gobierno necesita que los fabricantes chinos adopten millones de robots. También quiere que las empresas chinas empiecen a producir una cantidad mayor de estos robots. Se espera que esto genere un ciclo de retroalimentación que ayude a dar a luz a una nueva industria tecnológica inspirando innovaciones que puedan extenderse desde la fabricación a otros sectores y productos.

Introducir multitud de trabajadores robóticos, sin embargo, no es algo que pueda lograrse de la noche a la mañana. Así lo ha demostrado Foxconn, un fabricante taiwanés de 130.000 millones de dólares (unos 116.000 millones de euros) famoso por emplear a cientos de miles de trabajadores en fábricas del tamaño de una ciudad y por fabricar, entre otros productos, los iPhones de Apple. En 2011, el fundador y CEO de Foxconn, Terry Gou, dijo que esperaba disponer de un millón de robots en las fábricas de su empresa para 2014. Tres años más tarde, el esfuerzo se había demostrado más difícil de lo anticipado, y tan sólo se habían desplegado varias decenas de miles de robots.
A pesar de los retos, el director gerente del Comité de Desarrollo de la Automatización Tecnológica de Foxconn, Day Chia-peng, afirma que la empresa está automatizando un número creciente de tareas en sus líneas de producción. Estas incluyen la fabricación de pantallas y circuitos impresos, aunque los procesos que incluyan doblar los componentes o encajarlos a presión todavía presentan muchos retos. La empresa hasta explora maneras de rediseñar los propios productos para facilitar la fabricación automatizada. Y recientemente ha afirmado que venderá algunos de los robots que ha desarrollado a otros fabricantes.
La transición hacia trabajadores robóticos puede que revolucione la sociedad china, dado que una gran parte de su población se dedica a la fabricación.
La transición hacia trabajadores robóticos puede que revolucione la sociedad china. Algunos trabajadores desplazados podrían encontrar trabajo en el sector de servicios, pero no todos los 100 millones de trabajadores que ahora trabajan en fábricas encontrarán una buena afinidad con tales trabajos. Así que un cambio repentino hacia los robots y la automatización podría provocar dificultades económicas y malestar social. «Se puede argumentar que la tecnología robótica es la manera de salvar la fabricación en China», afirma el profesor de la Escuela Sloan de Negocios del MIT, Yasheng Huang. Aunque el experto advierte: «Pero China también dispone de una enorme fuerza laboral. ¿Qué será de ella?»
Robots bailones
Varios días antes de visitar CIG, acudí al primer evento chino de robótica, la Conferencia Mundial de Robótica, celebrada dentro de una enorme sala de exhibiciones del Parque Olímpico de Pekín. La ciudad estaba experimentando una inesperada ola de frío, y la producción de electricidad para cumplir con sus necesidades energéticas había generado una contaminación atmosférica procedente de las cercanas plantas a carbón que abrasaba los pulmones. Pero ni la nieve ni la niebla tóxica lograron disuadir a los cientos de investigadores y empresas y miles de asistentes de acudir al evento.
Primero se celebró una teatral ceremonia de apertura, durante la cual una enorme pared de vídeo mostró las innovaciones alcanzadas en la historia de China mezcladas, de forma algo extraña, con videoclips de robots de películas de ciencia ficción. La lista de invitados incluía a varios líderes políticos importantes. El vicepresidente de China, Li Yuanchao, leyó mensajes de felicitaciones del presidente, Xi Jinping, y del primer ministro, Li Kequiang. El vicepresidente dijo que las inversiones en investigaciones robóticas no sólo alimentarían la industria de fabricación del país, sino también fomentarían un mayor nivel de innovación nacional.

Foto: Un trabajador de CIG inspecciona una máquina diseñada para montar circuitos impresos. Crédito: Daniele Mattioli.
Después de varias ponencias, paseé por interminables demostraciones de empresas de robótica e institutos de investigación. Pude observar un enorme robot industrial con un apéndice con forma de horquilla que realizaba algún tipo de trabajo rutinario de fábrica a un ritmo frenético. Otras demostraciones fueron más caprichosas, como una pequeña máquina industrial que realizaba una cautivante interpretación de un tradicional baile de dragón chino (con el traje típico puesto) y un robot móvil equipado con dos raquetas que jugaba al bádminton con unos emocionados asistentes. Un robot humanoide con ojos parpadeantes portaba una pequeña aspiradora en una bandeja.
También se pudo entender la ambición de China a la hora de intentar reemplazar trabajadores humanos en sus fábricas. HIT Robot Group, una empresa afiliada con una de las universidades tecnológicas más destacadas del país, el Instituto Harbin de Tecnología, había desarrollado un prototipo de línea de producción de baterías que se estructuraba en forma de un único robot gigante. Los vehículos robóticos transportaban componentes entre varias máquinas de fabricación. Los únicos sitios para los humanos eran dentro de una sala de control en el centro y en una línea de producción donde se realizaban trabajos manuales especialmente finos. Después aprendí que HIT calcula que la nueva fábrica podría reducir las labores humanas en hasta un 85%.
Pero también era evidente que como país con un historial interminable de mano de obra barata, China se ha quedado rezagada frente a la revolución robótica. Rethink Robotics, una empresa de Boston (EEUU), exhibió un par de máquinas industriales flexibles e inteligentes. A diferencia de los convencionales robots industriales, estos productos, llamados Baxter y Sawyer, requieren muy poca programación, y están equipados con sensores que los permiten reconocer objetos y evitar chocar con la gente. También cuestan entre 20.000 y 30.000 dólares (entre unos 18.000 y 27.000 euros) en lugar de los cientos de miles de dólares que cuestan generalmente los robots industriales. Hablando después del evento, el fundador de Rethink Robotics y pionero de la robótica, Rodney Brooks, dijo que China representa un enorme mercado en potencia para su empresa, que abrió recientemente una sede en Shanghái. También es probable que los fabricantes chinos de robots empiecen a producir unos robots más flexibles e inteligentes. Pero por ahora, sus productos van por detrás de los de los fabricantes occidentales.
Así, Brooks me contó un pequeño juego que su empresa practica cuando acude a una feria comercial en Extremo Oriente: «Miramos los robots industriales de empresas pequeñas y decimos: ‘Este es una copia de este, y eso es un copia de lo otro'». El experto cree que a las empresas chinas les costará algo de tiempo recuperar terreno perdido.
Reinventado en China
Para comprobar en primera persona todo lo que les queda por hacer a los investigadores chinos, visité la Universidad Jiao Tong de Shanghái, una de las instituciones más prestigiosas del país y el hogar del laboratorio de robótica académico más antiguo de China, fundado en 1979. Me encontré en un frondoso y extenso campus en las afueras de Shanghái, rodeado por estudiantes montados sobre unas chirriantes bicicletas. Allí encontré un moderno edificio que alojaba el laboratorio de robótica.
Zhu Ziangyang, un profesor de cuarenta y muchos años con gafas de montura fina y un chaleco de forro polar, me dio la bienvenida a su despacho con un té y una sonrisa incontenible. El laboratorio dispone de varias docenas de profesores y científicos de investigación y más de 100 estudiantes de postgrado y doctorado, y Zhu se siente justificadamente orgulloso de sus investigaciones. En una sala había una silla de ruedas que controlaba con el cerebro y operaba mediante una gorra de electroencefalograma que llevaba un alumno de postgrado. Un vídeo mostraba una cucaracha cíborg equipada con un implante inalámbrico que se conectaba a su sistema nervioso periférico, lo que permitía controlar los movimientos de la criatura desde un ordenador. En otra sala, un investigador demostró unos robots de cuerpo blando, a modo de serpiente, capaces de estirarse y arrastrarse por espacios estrechos. Dentro de un garaje, un prototipo de coche autónomo, no muy distinto a los de Google, está siendo desarrollado en colaboración con un fabricante automovilístico chino llamado Chery.


Foto: Investigadores de la Universidad Jiao Tong de Shanghái están desarrollando robots humanoides y andantes. Crédito: Daniele Mattioli.
A pesar de los impresionantes proyectos de investigación de la Universidad de Jiao Tong, seguía preguntándome cómo cumplirá China con sus ambiciones de fabricación. Kai Yu es el fundador de una start-up llamada Horizon Robotics y anteriormente fue el director de un laboratorio de investigación centrado en la inteligencia artificial (IA) de Baidu, la empresa de internet dominante en China. Dentro del laboratorio de Baidu, Yu y sus compañeros se centran en un campo de la IA llamado aprendizaje profundo, que implica el entrenamiento de grandes redes neuronales simuladas para reconocer patrones dentro de los datos. Los investigadores ahora empiezan a explorar cómo el aprendizaje de máquinas podría hacer que la próxima generación de robots industriales sea aún más inteligente y flexible. Yu me contó: «En el futuro, lo que yo veo es a China siendo más creativa [en la robótica]. Diseños originales, ideas originales, pero también algunas de las tecnologías fundamentales, como el aprendizaje profundo, redes neuronales y la inteligencia artificial«.
Yu cree que las técnicas de IA desarrolladas por las grandes empresas chinas de internet para búsquedas, comercio electrónico y otros propósitos podrían aplicarse a los robots. El experto se defendió: «China tiene una muy buena oportunidad para ponerse al día. Las técnicas que han aprendido durante los últimos cinco años pueden ser aplicadas al desarrollo de máquinas inteligentes».
Necesitamos introducirnos cada vez más en la robótica avanzada. Eso podrá ayudarnos a lograr una fábrica oscura.
Cuando visité después la fábrica de CIG, no resultó demasiado difícil imaginar cómo tales avances podrían empezar a alimentar los esfuerzos de Wong por automatizar sus operaciones. Para empezar, un robot capaz de aprender y adaptarse no debería confundirse ante una caja mal alineada que necesite una etiqueta.
Después de la visita, Wong me enseñó una presentación de PowerPoint que explicaba el plan de la empresa durante los próximos años, y después la conversación se tornó a la robótica inteligente. El responsable detalló: «Emplearemos unos robots básicos, y luego pasaremos a otros más avanzados. Necesitamos introducirnos cada vez más en la robótica avanzada. Eso podrá ayudarnos a lograr una fábrica oscura«.
Dada la imperativa económica, la determinación del Gobierno y la creciente sofisticación tecnológica del país, parece muy probable que las empresas de fabricación del país se automaticen con éxito y China se convierta en un líder de las tecnologías de automatización avanzada.
Y aun así, resulta extraño imaginar los cambios venideros para los trabajadores chinos de la fabricación. En un momento de nuestra visita, habíamos pasado por un grupo de 20 personas disfrutando de su descanso de tarde. Todos parecían dormir, con sus cabezas apoyadas sobre los brazos cruzados y colocados delante de ellos. Para nada es algo que necesitaría hacer un robot. Pero no pude evitar preguntarme qué les pasará a esos trabajadores cuando los robots se hayan hecho con sus trabajos. Wong dice que probablemente vuelvan a sus pueblos natales y encuentren trabajo allí, en una granja o tal vez en una tienda o un restaurante. Puede ser, pero para algunos no resultará tan sencillo.
Una semana después de volver de China, recibí un correo electrónico de Wong con más detalles sobre sus planes, junto con una promesa característicamente atrevida. Wong escribió: «Mantengamos el contacto. Haremos realidad la fábrica oscura».
FlexShapeGripper: el agarre de la lengua de un camaleón
Un tema importante en automación es recoger, sostener y colocar en su lugar objetos. Los sistemas de agarre siempre han jugado un papel clave en la producción. La empresa Festo, así como otras en este mercado, están todo el tiempo a la búsqueda de nuevos métodos de agarre y soluciones innovadoras que aporten soluciones a los sistemas de producción en las fábricas futuras
Cada vez más la naturaleza es fuente de inspiración de nuevos conocimientos y tecnologías del futuro. Es por eso que Festo creó Bionic Learning Network, una alianza con universidades, institutos y empresas de desarrollo para estudiar un rango de diferentes mecanismos de agarre, en muchas ocasiones utilizando como modelo la biología.
Recoger y ubicar en su lugar todo tipo de formas
En colaboración con los Colegios de Ciencias Aplicadas de la Universidad de Oslo y de Akershus, Festo presenta ahora una pinza cuyo principio de funcionamiento deriva de la lengua de un camaleón. La FlexShapeGripper puede recoger, reunir y colocar en su lugar varios objetos de la más amplia variedad de formas en un único procedimiento, sin necesidad de una conversión manual. Esto es posible por extremo de silicona lleno de agua, que se envuelve alrededor de los artículos y los agarra de un modo flexible y ajustado.
La naturaleza como modelo
La capacidad inherente de adaptarse a diferentes formas le aporta su nombre a este sistema: FlexShapeGripper, o Pinza de Forma Flexible. En la naturaleza, la combinación única de fuerza y ajuste a la forma que posee la lengua del camaleón se pueden observar cuando éste caza insectos.
Una vez que el camaleón tiene a su presa en la mira, dispara su lengua disparar como una banda elástica. Justo antes de que la punta de la lengua alcance el insecto, se retrae en el medio, mientras que los bordes continuarán moviéndose hacia delante. Esto hace que la lengua se adapte a la forma y el tamaño de las respectivas presas, y que las atrape firmemente. La presa se adhiere a la lengua y el camaleón tira de ella como si se tratase de un hilo de pescar.
Nuevo impulso gracias a la innovación abierta
Entre los objetivos de la Bionic Learning Network (Red de Aprendizaje Biónico) no sólo está aprender de la naturaleza, sin embargo, sino también identificar buenas ideas en sus primeras etapas, y fomentarlas y al mismo tiempo aplicarlas más allá de las fronteras de la empresa. La pinza es un sobresaliente ejemplo de la estrecha colaboración de Festo con universidades internacionales que forman parte de la red.

El estímulo para este proyecto fue un taller sobre el tema de biónica en el Colegio de Ciencias Aplicadas de la universidad de Oslo y Akershus, donde Festo presentó sus actuales líneas de investigación en el Bionic Learning Network. Dos de los estudiantes se inspiraron, en primer lugar por la presentación, y luego por la propia naturaleza: como parte de su tesis de maestría, presentaron el principio de agarre biónico modelado en base a la lengua de un camaleón. Junto con los ingenieros de Festo, los materiales, diseño y componentes neumáticos de la pinza fueron optimizados y el diseño para la FlexShapeGripper se desarrolló aún más.
Configuración técnica de la pinza
La pinza consiste en un cilindro de doble acción, una cámara se llena con aire comprimido mientras que la segundo está permanentemente llena con agua. Esta segunda cámara está equipada con una pieza moldeada de de silicona elástica equivalente a la lengua de camaleón. El volumen de las dos cámaras está diseñado de manera que se compense la deformación de la parte de silicona. El pistón, que separa en forma estanca las dos cámaras una de otra, está fijado a una delgada varilla en el interior del extremo de silicona.
Un agarre ceñido gracias a la recarga
Durante el procedimiento de sujeción, un sistema de manipulación guía la pinza hacia el objeto de modo que toque el artículo con su extremo de silicona. A continuación, se retira el aire de la cámara de presión superior. El pistón se mueve hacia arriba a causa de un soporte de resorte y tira hacia adentro de la pieza de silicona llena de agua. Al mismo tiempo, el sistema de manipuleo lleva la pinza aún más hacia el objeto. Al hacerlo, la cobertura de silicona se envuelve alrededor del objeto a ser agarrado, que puede ser de cualquier forma, resultando en una manera apretada de soporte. La elasticidad de la silicona permite una precisa adaptación a una amplia gama de geometrías. La elevada fricción estática del material genera una buena fuerza de retención.
Ambos mecanismos de agarre y de liberación se activan neumáticamente. No se necesita energía adicional en el proceso de sostener la pieza. La calidad flexible de la compresión con el aire comprimido simplifica la coordinación entre el sistema de sostén y la pinza de manipulación durante la etapa de agarre. La fuerza y la deformación de la parte de silicona se puede ajustar de forma muy precisa con la ayuda de una válvula proporcional. Esto permite que se puedan agarrar varias piezas a la vez en un procedimiento único.

Las características especiales del camaleón
Los camaleones son criaturas fascinantes. Pueden mover sus ojos de forma independiente uno del otro y cambiar su color en función de su estado de ánimo, la temperatura y el ambiente que los rodea. Otra característica especial es su estrategia de caza. Con la única manera en que disparan su lengua, pueden atacar tan rápido como un rayo y traer de vuelta a su presa con toda seguridad.
Un camaleón puede coger todo tipo de insectos, poniendo su lengua sobre la presa, y asegurarla encerrándola. El uso de este principio en la FlexShapeGripper perimite agarrar todo tipo de objetos de forma precisa. Con su extremo de silicona elástica, incluso puede recoger varios objetos en una sola acción de agarre y ubicarlos en un nuevo lugar juntos.
Pinzas en la automatización de hoy
Ya hay una cantidad de pinzas diferentes en las áreas automatizadas de la industria de hoy, y cada una de ellas ha sido desarrollada para una tarea especial. Si cambia la forma de una pieza con la que se trabaja, la correspondiente pinza debe ser reemplazada en la máquina, o debe ser adaptada, lo que requiere un gran esfuerzo. En instalaciones que producen diversos productos, se utilizan con frecuencia sistemas de cambio, equipados con diferentes pinzas.
Requisitos de fábrica del mañana
En la producción del futuro, sin embargo, habrá una necesidad de instalaciones y componentes más flexibles, que deben ajustarse de manera independiente para el producto correspondiente en una línea de producción con el método de «enchufar y producir». Las pinzas adaptables como la FlexShapeGripper pueden asumir un papel importante en este sentido.
Usos futuros potenciales
En el futuro, la FlexShapeGripper podría ser utilizada en cualquier instalación donde se manejan al mismo tiempo varios objetos con un rango de formas diferentes; por ejemplo en el sector de la robótica de servicios, para tareas de montaje o para manipular piezas pequeñas.
En las plantas flexibles de producción, sería posible manejar todos los tipos de productos en un solo procedimiento, sin tener que cambiar la pinza. El trabajo de selección de frutas y verduras u otros objetos con formas irregulares también es una tarea posible para un pinza universal como la FlexShapeGripper.
Una vez que puesta en funcionamiento, la pinza es capaz de hacer varias tareas. Esta integración funcional es un buen ejemplo de cómo los sistemas y los componentes en sí se pueden adaptar en el futuro a una variedad de escenarios de producción.
El proyecto también muestra cómo Festo aprovecha nuevos hallazgos en la naturaleza para su negocio principal, el de la automatización, y la importancia del intercambio de información interdisciplinario más allá de las fronteras de la empresa.
Fuente: Festo. Aportado por Eduardo J. Carletti
Más información:
- Diseñan biorobots que se mueven gracias a fibras musculares accionadas por impulsos eléctricos
- Un equipo internacional crea músculos con hilos de coser y pescar
- Un tentáculo robótico de silicona operado neumáticamente
- Las manos del robot alcanzan un toque delicado: tecnología de detección táctil basada en pequeños chips de barómetro
- Diseño de medusas robot lleva a descubrir reglas de curvatura en el impulso de las alas o aletas de los animales
- Informática con neuronas de silicio: células nerviosas artificiales para clasificar diferentes tipos de datos
- Minúsculos robots nadan como los espermatozoides
- Recreando el ojo de una mosca
Raspberry Pi 2, nueva plaqueta mini-computadora
La nueva plaqueta Raspberry Pi 2 incluye un CPU ARM de 900 MHz Cortex-A7 de cuatro núcleos (~ 6x rendimiento), 1 GB de SDRAM LPDDR2 (2x memoria), total compatibilidad con Raspberry Pi 1. Debido a que tiene un procesador ARMv7, puede correr la gama de distribuciones ARM GNU/Linux, incluyendo Snappy Ubuntu Core, así como Microsoft Windows 10

BCM2836 y Raspberry Pi 2
Nos comenta Eben Upton, fundador de raspberrypi.org, que desde que lanzaron la original Raspberry Pi Modelo B, allá por el 2012, realizaron una enorme cantidad de trabajo de software para sacar lo mejor del procesador BCM2835 de Broadcom y el CPU ARM11 de 700 MHz. «Hemos gastado mucho dinero en la optimización de una amplia variedad de bibliotecas y aplicaciones de código abierto, incluyendo WebKit, LibreOffice, Scratch, Pixman, XBMC/Kodi, libav y PyPy. Al mismo tiempo, el proyecto Raspbian, dirigido por Peter Green y Mike Thompson, nos ha proporcionado una reconstrucción de Debian compatible con ARMv6 con soporte de hardware de punto flotante, y Gordon, Dom y Jonathan [miembros del equipo de desarrollo de Raspberry Pi] han gastado miles de horas de trabajo en el firmware y soporte de la tarjeta para hacer Raspberry Pi la computadora en una plaqueta más estable del mundo. Vale la pena ir y ver una imagen de la vieja tarjeta SD de 2012 para tener una idea de lo lejos que hemos llegado».
Sin embargo, llega un momento en que ya no hay nada más por hacer para seguir adelante que tener más memoria y un mayor rendimiento de la CPU. «Nuestro desafío era encontrar la manera de conseguirlo sin lanzar a la nada nuestra inversión en la plataforma ni echar a perder todos esos proyectos y tutoriales que se basan en los detalles precisos del hardware de Raspberry Pi. Afortunadamente para nosotros, Broadcom estuvo dispuesto a dar un paso adelante con un nuevo SoC (Sistema en un chip, o System on a Chip en inglés), el BCM2836. Conserva todas las características del BCM2835, pero cambia el ARM11 de 700MHz único con un complejo ARM de cuatro núcleos Cortex-A7 de 900 MHz: todo lo demás se mantiene igual, por lo que no se da una transición dolorosa o una disminución de la estabilidad».
Una vez que estuvieron seguros de que BCM2836 funcionaba como se esperaba, diseñaron una serie de prototipos hasta llegar a la Raspberry Pi 2 Modelo B, que se acaba de lanzar el lunes (2 de febrero de 2015). Tiene una forma idéntica a la existente Raspberry Pi 1 Modelo B+, pero se las arregla para contener tanto el nuevo BCM2836 y un 1 GB de SDRAM de Micron. Todos los conectores están en el mismo lugar y tienen la misma funcionalidad, y la tarjeta todavía se puede ejecutar conectada a un adaptador de corriente micro-USB de 5V.

Raspberry Pi 2 está disponible para su compra desde los socios del fabricante element14 y RS Components. Su precio de venta es de u$s 35 (el mismo precio que el modelo B+ existente). Se requiere un NOOBS (New Out Of the Box Software) actualizado, la imagen Raspbian, incluyendo el kernel ARMv7 y módulos, que se pueden descargar gratuitamente. Al lanzamiento, se está utilizando el mismo espacio de usuario ARMv6 Raspbian tanto en la Raspberry Pi 1 como en la 2; pero en los próximos meses ellos investigarán si pueden obtener un mayor rendimiento con el Debian ARMv7, o si pueden reemplazar selectivamente una pequeña cantidad de bibliotecas para obtener lo mejor de ambos mundos. Ahora que están usando un núcleo ARMv7, también se puede ejecutar Ubuntu: ya está disponible un Snappy Ubuntu Core y estará disponible un paquete NOOBS en el próximo par de semanas.
Windows 10
Durante los últimos seis meses han estado trabajando estrechamente con Microsoft para producir el próximo Windows 10 para Raspberry Pi 2. Microsoft tendrá mucho más para compartir en los próximos meses. La versión de Windows 10 compatible con Raspberry Pi 2 estará disponible en forma gratuita para los creadores.
Indican que se debe visitar WindowsOnDevices.com para participar en el Programa de Desarrollo de Windows para IoT (Internet of Things, Internet de las Cosas) y recibir actualizaciones a medida que estén disponibles.
Preguntas frecuentes
¿Se descontinuará los Raspberry Pi 1 Modelo B y B+?
No. Tenemos una gran cantidad de clientes industriales que querrán seguir con el Raspberry Pi 1 por el momento. Vamos a seguir construyendo Raspberry Pi 1 Modelo B y el Modelo B+, siempre y cuando haya demanda de ellos. Ambas placas se seguirán vendiendo por u$s 35.
¿Qué pasa con el Modelo A+?
El modelo A+ sigue siendo el Raspberry Pi para iniciarse con un valor de u$s 20. Aunque la nueva plaqueta se llama Raspberry Pi 2 Modelo B, no tenemos planes para introducir una Raspberry Pi 2 Modelo A antes del final de 2015.
¿Qué pasa con el Módulo de Cálculo?
Esperamos introducir un módulo de cálculo basado en el BCM2836 en el mediano plazo, pero por ahora estamos enfocados en el lanzamiento de Raspberry Pi 2 Modelo B.
¿Todavía usa VideoCore?
Sí. VideoCore IV 3d es el único núcleo de gráficos 3d públicamente documentado para SoCs basados en ARM, y queremos mantener Raspberry Pi abierto.
¿De dónde viene la cifra «rendimiento 6x»?
El aumento de velocidad varía entre aplicaciones. Hemos visto pruebas de referencia de la CPU con un único subproceso que acelera por lo menos 1,5 veces, mientras que Sunspider resulta alrededor de 4 veces más rápido, y los códecs de vídeo NEON habilitados para multinúcleo pueden ser más de 20 veces más rápidos. 6x es un número típico para una prueba de comparación de CPU multi-hilo como SysBench.
¿Es esta una versión completa de Windows 10?
Por favor, consulte WindowsOnDevices.com.
Especificaciones Raspberry Pi 2
- Procesador de cuatro núcleos Broadcom BCM2836 ARM Cortex-A7
- GPU VideoCore IV doble núcleo con soporte OpenGL ES 2.0, aceleración por hardware OpenVG, 1080p 30 frames, H.264
- 1 GB LPDDR2 SDRAM
- Salida de vídeo 1080p
- Salida vídeo compuesto (PAL / NTSC)
- Salida de audio estéreo
- Ethernet 10/100 Base
- HDMI 1.3 y 1.4
- Audio compuesto jack 3,5 mm
- 4 puertos USB 2.0
- MPI CSI-2
- Socket MicroSD
- Conector Serie
- GPIO 40 pines
Precio y disponibilidad Raspberry Pi 2
RS, uno de los dos distribuidores principales, ya tiene a la venta el nuevo modelo. El precio es idéntico al anterior: 35 dólares, ofreciendo entonces más potencia al mismo precio en esta mini-computadora con base ARM y sistema operativo Linux en formato de placa única.
Fuente: RaspberriPi.com
Algunas notas sobre programación del robot didáctico programable
En esta publicación: Robot Programable: Diagrama Básico en Bloques prometo, al final, que voy a continuar con los detalles de circuito y de programación. En la entrada: El microcontrolador «cerebro» del robot programable (básico) hay mucho de circuito (hardware), ya que el artículo contiene una descripción bastante detallada de las secciones del chip microcontrolador que utilizamos por ahora, y también detalles de configuración y uso del chip que tienen una enorme relación con la programación.
Concretamente, que algo he cumplido de la promesa.
Los artículos hasta ahora venían más o menos sincronizados con el avance de las clases, pero para esta fecha obviamente estamos en receso de verano y no hay actividad, ni la habría aunque me lo propusiera, ya que por suerte los chicos asisten a una colonia de verano. A mí tampoco el calor me favorece mucho para mover las neuronas, por eso estuve dedicando algunos artículos a la mecánica, a la búsqueda de soluciones para abaratar la construcción de la base mecánica del robot.
De eso aún falta, me quedan algunas cosas por solucionar, y me dedico casi diariamente al tema. Ya les contaré.
Pero hay un programa básico ya escrito con el que hemos trabajado en clase, haciendo mover al robot. Este programa (escrito en assembler, o ASM) permite ordenar una secuencia de movimientos al robot. El programa tiene tres niveles: 1) las instrucciones básicas para mover los motores en el lenguaje del microcontrolador (son las mismas para toda la familia PIC16F, y se podrían utilizar en todos los modelos disponibles, si bien nuestro chip elegido es el PIC16F876A), 2) la inclusión posterior de las instrucciones básicas dentro de subrutinas a las que se puede llamar programando con palabras en castellano en lugar de con los mnemónicos de la programación ASM, lo cual facilita la comprensión, y finalmente 3) la conversión de estas subrutinas en macros.
Utilizando macros se programa directamente con la palabra que hemos definido para el comando; ni siquiera hace falta utilizar la instrucción CALL de ASM que se necesita para hacer correr una subrutina.
Voy a explicar poco a poco la programación, en todos los pasos.
Primero que nada: la configuración inicial del chip
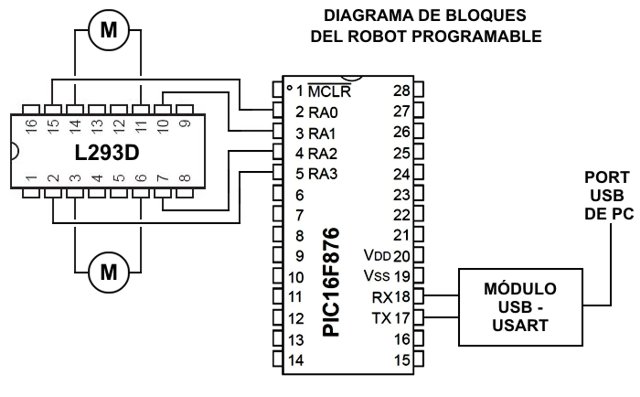
Recordemos primero el diagrama en bloques, ya que hay que definir las funciones de las patas del chip teniendo en cuenta este circuito.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 |
<span style="color: #00008b;"><b> list P = 16F876a ; indica el modelo de microprocesador a usar include "P16f876a.inc" ; provee declaraciones necesarias para el chip ERRORLEVEL 1;-302 ; para evitar los mensajes de cambio de ; banco en el resultado del compilador ; Declaraciones que definen el funcionamiento básico del chip __config _CP_OFF & _XT_OSC & _WDT_OFF & _PWRTE_ON & _LVP_OFF & _BODEN_OFF CBLOCK 0x20 ; Declarar las variables d1 ; usada en Retardos d2 ; usada en Retardos d3 ; usada en Retardos ENDC ; ; ----------- ; INICIALIZAR ; ----------- org 0x0000 ; Indica la dirección de origen del programa clrf STATUS ; limpia el registro de estado movlw 0x00 ; valor cero 00 movwf PCLATH ; al contador de programa = comienzo goto Comienzo ; Salto a comienzo ; Comienzo ; BANCO bcf STATUS,RP0 ; Prepara bcf STATUS,RP1 ; RAM Página 0, en pág 0 están los registros ; de salida de los puertos ; ------------------------------------ ; PUERTOS movlw 0x00 movwf PORTA ; Inicializar valores del PORT A movlw 0x00 movwf PORTB ; Inicializar valores del PORT B movlw 0x80 movwf PORTC ; Inicializar valores del PORT C ; ------------------------------------ ; BANCO bsf STATUS,RP0 ; RAM Page 1, en pág 1 están los registros ; de configuración de los puertos y ; otros módulos del microcontrolador ; --------------------------------------------------------------- ; FUNCION DE LAS PATAS DE LOS PORTS ; --------------------------------------------------------------- movlw b'00000000' movwf TRISA ; Todas las patas port A como salidas movlw b'00000000' movwf TRISB ; Todas las patas port B como salidas movlw b'10111111' movwf TRISC ; Todas las patas port C como entradas excepto RC6/TX movlw 0x06 ; Todas las patas del puerto entrada/salida digital movwf ADCON1 ; esto es necesario para el buen funcionamiento ; de los puertos que tienen ; opciones analógicas (convertidor A/D) ; ; ----------------------------------------------------------- ; BANCO bcf STATUS,RP0 ; Página RAM 0, la operación normal se realiza ; en la página 0 de RAM ; ----------------------------------------------------------- </b></span> |
Es conveniente que vayamos explicando las líneas de instrucciones por partes:
|
1 2 3 4 5 |
<span style="color: #00008b;"><b> ; ----------------------------------------------------------- list P = 16F876a ; indica el modelo de microprocesador a usar include "P16f876a.inc" ; provee declaraciones necesarias para el chip ; -----------------------------------------------------------</b></span> |
La indicación list P es muy directa, con ella se le dice al programa de compilación que vamos a trabajar en un programa para el PIC16F876A.
La indicación include incluye en el programa, en el momento de compilarlo, todo el texto que se encuentra dentro del archivo que se indica a continuación P16f876a.inc. En estos archivos (provistos por el fabricante) se definen nombres en letras para todas las partes del microcontrolador, que de otro modo deberían estar indicadas en el programa con números hexadecimales. Esta práctica evita el trabajo de estar memorizando o buscando en una tabla estos números, y facilita la comprensión al leer el programa, y permite un fácil intercambio de programas (migración) entre diferentes microprocesadores.
Por ejemplo, dentro de P16f876a.inc define así al puerto A: PORTA EQU H’0005′. Podríamos cambiar la declaración dentro de este archivo y llamar al puerto con un nombre en español, por ejemplo: PuertoA EQU H’0005′. Luego podríamos programar utilizando este nombre y funcionaría correctamente.
|
1 2 3 4 5 6 |
<span style="color: #00008b;"><b>; ----------------------------------------------------------- ERRORLEVEL 1;-302 ; para evitar los mensajes de cambio de ; banco en el resultado del compilador ; ----------------------------------------------------------- </b></span> |
Esta línea no es imprescindible y se utiliza para evitar molestas indicaciones de aviso cuando se cambia de banco de RAM en el programa. Las indicaciones no son necesarias si en el programa hemos realizado correctamente los cambios de banco.
|
1 2 3 4 5 6 |
<span style="color: #00008b;"><b> ; ----------------------------------------------------------- ; Declaraciones que definen el funcionamiento básico del chip __config _CP_OFF & _XT_OSC & _WDT_OFF & _PWRTE_ON & _LVP_OFF & _BODEN_OFF ; ----------------------------------------------------------- </b></span> |
Los microcontroladores poseen una serie de configuraciones que se fijan por única vez al principio de la operación y definen ciertas partes esenciales de su funcionamiento. En el ejemplo:
_CP_OFF (Code Protection) define que no protegeremos el código de ser leído desde la memoria de programa del chip. Es posible definir _CP_ON cuando ya tenemos un programa totalmente probado en un equipo que vamos a entregar y no deseamos que alguien se lo copie leyéndolo desde la memoria de programa del microcontrolador.
_XT_OSC define el modo de oscilador de reloj del chip. En este caso, la opción _XT_OSC indica que se utilizará un cristal o resonador conectado al chip para definir la frecuencia de trabajo.
_WDT_OFF está relacionado con la función de «Despertador» («Watchdog timer» en inglés) que se utiliza en aquellos casos en que se desea que el microcontrolador sea «despertado» de posibles estados en que haya quedado detenido, sea porque quedó esperando una señal de activación externa o porque falló su programa o porque se lo puso intencionalmente en ese estado por programa. El watchdog timer (WDT) puede producir un reinicio del microcontrolador PIC cada cierto período de tiempo, y recomenzar la ejecución del programa. Esto es para evitar que el dispositivo entre en un lazo infinito (se «cuelgue»), o se quede en una espera muy prolongada por un determinado evento que no ocurre. Durante la operación normal, el watchdog timer (en español «perro guardián» o «despertador») genera un reinicio del microcontrolador PIC después del final de su período WDT. También cumple la función de sacar al dispositivo del modo Sleep («Dormir»). En este caso el watchdog timer ocasiona que se despierte el microcontrolador PIC y continúe con la operación normal (sin producir reinicio), lo que se conoce como despertar WDT. No lo utilizamos en este programa en particular, de modo que fijamos _WDT_OFF, o sea, Watchdog Timer apagado.
_PWRTE_ON (Power-up Timer) Habilita un temporizador que se dispara en el encendido y permite que, durante su espera, se estabilicen todos los circuitos antes de comenzar a correr el programa.
_LVP_OFF define el modo en que se puede programar el chip. Esta definición en OFF determina que no se puede programar el chip utilizando un sistema de programación de bajo voltaje. Los programadores de PICs utilizan un voltaje de 12 volts en la pata MCLR del chip para poder escribir en su memoria de programa. Al definir el estado OFF de esta configuración se previene una programación accidental (que modificaría el programa y dejaría no operativo al microcontrolador) con los voltajes estándar de funcionamiento en sus patas.
_BODEN_OFF El bit BODEN (Brown Out Reset) en la configuración define la activación o no de una detención del microcontrolador por un descenso de voltaje de alimentación. Puede ser útil, pero no lo utilizamos en este diseño, por eso lo definimos en OFF.
|
1 2 3 4 5 6 7 8 |
<span style="color: #00008b;"><b>; ----------------------------------------------------------- CBLOCK 0x20 ; Declarar las variables d1 ; usada en Retardos d2 ; usada en Retardos d3 ; usada en Retardos ENDC ; ----------------------------------------------------------- </b></span> |
En este bloque se declaran las variables que necesitaremos utilizar (y se reservan sus espacios en la memoria RAM). Por defecto, las variables son bytes (8 bits).
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 |
<span style="color: #00008b;"><b> ; ----------------------------------------------------------- ; INICIALIZAR ; ----------- org 0x0000 ; Indica la dirección de origen del programa clrf STATUS ; limpia el registro de estado movlw 0x00 ; valor cero 00 movwf PCLATH ; al contador de programa = comienzo goto Comienzo ; Salto a comienzo ; Comienzo ; BANCO bcf STATUS,RP0 ; Prepara bcf STATUS,RP1 ; RAM Página 0, en pág 0 están los registros ; de salida de los puertos ; ------------------------------------ ; PUERTOS movlw 0x00 movwf PORTA ; Inicializar valores del PORT A movlw 0x00 movwf PORTB ; Inicializar valores del PORT B movlw 0x80 movwf PORTC ; Inicializar valores del PORT C ; ------------------------------------ ; BANCO bsf STATUS,RP0 ; RAM Page 1, en pág 1 están los registros ; de configuración de los puertos y ; otros módulos del microcontrolador ; --------------------------------------------------------------- ; FUNCION DE LAS PATAS DE LOS PORTS ; --------------------------------------------------------------- movlw b'00000000' movwf TRISA ; Todas las patas port A como salidas movlw b'00000000' movwf TRISB ; Todas las patas port B como salidas movlw b'10111111' movwf TRISC ; Todas las patas port C como entradas excepto RC6/TX movlw 0x06 ; Todas las patas del puerto entrada/salida digital movwf ADCON1 ; esto es necesario para el buen funcionamiento ; de los puertos que tienen ; opciones analógicas (convertidor A/D) ; ; ----------------------------------------------------------- ; BANCO bcf STATUS,RP0 ; Página RAM 0, la operación normal se realiza ; en la página 0 de RAM ; ----------------------------------------------------------- </b></span> |
Las líneas de inicialización en este bloque están ampliamente explicadas con comentarios. En la última parte, debo aclarar que los registros TRIS son los que definen si una pata de entrada/salida es una entrada o una salida. Hay un registro TRIS para cada puerto: TRISA, TRISB y TRISC. Un 0 las define como salidas, un 1 las define como entradas. Por último, los microcontroladores con puertos cuyas patas se pueden definir como entradas al módulo Convertidor Analógico Digital (Analog/Digital Converter, o ADC, en inglés) tienen un registro de configuración en el que se debe definir si se utilizarán o no esas patas como entradas analógicas. Esto lo define el registro ADCON1 y el valor a definir para utilizar todas las patas como entrada/salida digital (tal como las utilizaremos por el momento) es 0x06 (hexadecimal 06).
Esencial: La parte del programa en sí
Observando el diagrama en bloques del robot programable, y con una lectura al artículo de apoyo sobre el chip de manejo de motores, podemos determinar que uno de los motores, el derecho, se maneja a través de dos patas del puerto A, RA0 y RA1, y el otro (izquierdo) a través de las patas RA2 y RA3 del puerto A.
La tabla de señales de control para los motores es como sigue:
| | | ||||||
| RA0 | RA1 | ACCIÓN | | | RA2 | RA3 | ACCIÓN |
| 1 | 0 | AVANCE | | | 0 | 1 | AVANCE |
| 0 | 1 | RETROCESO | | | 1 | 0 | RETROCESO |
| 0 | 0 | DETENIDO | | | 0 | 0 | DETENIDO |
| 1 | 1 | DETENIDO | | | 1 | 1 | DETENIDO |
Por lo tanto, las instrucciones de manejo de los motores se pueden definir del siguiente modo:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 |
<span style="color: #00008b;"><b>;------------ ; SUBRUTINAS ;------------ DerechoAdelante bsf PORTA,0 ; PORTA 0 = 1 - Motor derecho ad. bcf PORTA,1 ; PORTA 1 = 0 - Motor derecho ad. return ;------------------------------------- DerechoAtras bcf PORTA,0 ; PORTA 0 = 0 = Motor derecho atr. bsf PORTA,1 ; PORTA 1 = 1 = Motor derecho atr. return ;------------------------------------- DerechoDetenido bcf PORTA,0 ; PORTA 0 = 0 = Motor derecho det. bcf PORTA,1 ; PORTA 1 = 0 = Motor derecho det. return ;------------------------------------- IzquierdoAdelante bcf PORTA,2 ; PORTA 2 = 0 = Motor izquierdo ad. bsf PORTA,3 ; PORTA 3 = 1 = Motor izquierdo ad. return ;------------------------------------- IzquierdoAtras bsf PORTA,2 ; PORTA 2 = 1 = Motor izquierdo atr. bcf PORTA,3 ; PORTA 3 = 0 = Motor izquierdo atr. return ;------------------------------------- IzquierdoDetenido bcf PORTA,2 ; PORTA 2 = 0 = Motor izquierdo det. bcf PORTA,3 ; PORTA 3 = 0 = Motor izquierdo det. return ; ----------------------------------------------------------- </b></span> |
Para realizar un movimiento necesitamos definir tiempos, y para eso, para empezar, podemos utilizar un simple rutina de «pérdida de tiempo» (el microcontrolador se queda «perdiendo tiempo» dentro de esta subrutina, y no hace ninguna otra cosa). La rutina la calculé utilizando los servicios del sitio Delay Code Generator donde se puede crear un código de retardo para PICs definiendo algunos parámetros (en el futuro usaremos un módulo TIMER del microcontrolador, pero cada cosa a su tiempo).
La rutina de pérdida de tiempo es:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 |
<span style="color: #00008b;"><b>;------------ Retardo1seg movlw d'0' ; Frecuencia de reloj = 4 MHz ; Retardo real = 1 segundo = 1000000 ciclos ; Error = 0 % ;999997 ciclos movlw d'8' ; 0x08 movwf d1 movlw d'47' ; 0x2F movwf d2 movlw d'3' ; 0x03 movwf d3 Retardo_01 decfsz d1, f goto $+2 decfsz d2, f goto $+2 decfsz d3, f goto Retardo_01 ; 3 ciclos más goto $+1 nop return ; ----------------------------------------------------------- </b></span> |
Veamos entonces cómo es un programa que utilice estas subrutinas para ordenar al robot un movimiento en L.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 |
<span style="color: #00008b;"><b>; ----------------------------------------------------------- Principal call DerechoAdelante call IzquierdoAdelante ; call Retardo1seg ; call DerechoAdelante call IzquierdoDetenido ; call Retardo1seg ; call DerechoAdelante call IzquierdoAdelante ; call Retardo1seg ; call DerechoDetenido call IzquierdoDetenido ; ; las siguientes llamadas al retardo son para que el robot ; se detenga unos segundos antes de moverse nuevamente en 'L' ; y repetir esta secuencia constantemente... call Retardo1seg call Retardo1seg call Retardo1seg call Retardo1seg call Retardo1seg call Retardo1seg call Retardo1seg call Retardo1seg call Retardo1seg call Retardo1seg ; goto Principal ; ----------------------------------------------------------- </b></span> |
El programa completo en ASM con el método de llamado a subrutinas es el que sigue. Más abajo encontrarán un enlace para bajarse el archivo en formato TXT con el programa completo en ASM listo para compilar. En el próximo artículo presentaré la conversión del programa al método de programación con MACROS y una serie de ejemplos de programas con distintas rutinas de movimiento.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 |
<span style="color: #00008b;"><b>;************************************************************************ ; Procesador: PIC16F876 con Xtal 4 MHz ; Función: Manejo del robot programable ; Hardware: Protoboard ; Archivo: 01 ; Autor: Eduardo J. Carletti ; Fecha: 21 septiembre 2014 ; ; Historia: El robot avanza formando una L ; ;************************************************************************* list P = 16F876a include "P16f876a.inc" ERRORLEVEL 1;-302 ; para evitar los mensajes de cambio de ; banco en el resultado del compilador __config _CP_OFF & _XT_OSC & _WDT_OFF & _PWRTE_ON & _LVP_OFF & _BODEN_OFF CBLOCK 0x20 ; Declarar las variables d1 ; usada en Retardo1seg d2 ; usada en Retardo1seg d3 ; usada en Retardo1seg ENDC ; ; ----------- ; INICIALIZAR ; ----------- ; org 0x0000 ; Indica la dirección de origen del programa clrf STATUS ; limpia el registro de estado movlw 0x00 ; valor cero 00 movwf PCLATH ; al contador de programa = comienzo goto Comienzo ; Salto a comienzo org 0x0004 ; Comienzo ; BANCO bcf STATUS,RP0 bcf STATUS,RP1 ; RAM Página 0 ; ------------------------------------ movlw 0x00 movwf PORTA ; Inicializar PORT A movlw 0x00 movwf PORTB ; Inicializar PORT B movlw 0x80 movwf PORTC ; Inicializar PORT C ; ; ------------------------------------ ; BANCO bsf STATUS,RP0 ; RAM Page 1 ; --------------------------------------------------------------- ; FUNCION DE LAS PATAS DE LOS PORTS ; --------------------------------------------------------------- ; movlw 0x00 movwf TRISA ; Todas las patas port A salida movlw 0x00 movwf TRISB ; Todas las patas port B salida movlw b'10000000' movwf TRISC ; Todas las patas port C salida excepto RC7/RX movlw 0x06 ; Todas las patas entrada/salida digital movwf ADCON1 ; ; ----------------------------------------------------------- ; BANCO bcf STATUS,RP0 ; Página RAM 0 ; ----------------------------------------------------------- ; ----------------------------------------------------------- ; PRINCIPAL ; ----------------------------------------------------------- Principal call DerechoAdelante call IzquierdoAdelante ; call Retardo1seg ; call DerechoAdelante call IzquierdoDetenido ; call Retardo1seg ; call DerechoAdelante call IzquierdoAdelante ; call Retardo1seg ; call DerechoDetenido call IzquierdoDetenido ; call Retardo1seg call Retardo1seg call Retardo1seg call Retardo1seg call Retardo1seg call Retardo1seg call Retardo1seg call Retardo1seg call Retardo1seg call Retardo1seg ; goto Principal ; ;------------------------------------- ; SUBRUTINAS ;------------------------------------- DerechoAdelante bsf PORTA,0 ; PORTA 0 = 1 - Motor derecho ad. bcf PORTA,1 ; PORTA 1 = 0 - Motor derecho ad. return ;------------------------------------- DerechoAtras bcf PORTA,0 ; PORTA 0 = 0 = Motor derecho atr. bsf PORTA,1 ; PORTA 1 = 1 = Motor derecho atr. return ;------------------------------------- DerechoDetenido bcf PORTA,0 ; PORTA 0 = 0 = Motor derecho det. bcf PORTA,1 ; PORTA 1 = 0 = Motor derecho det. return ;------------------------------------- IzquierdoAdelante bcf PORTA,2 ; PORTA 2 = 0 = Motor izquierdo ad. bsf PORTA,3 ; PORTA 3 = 1 = Motor izquierdo ad. return ;------------------------------------- IzquierdoAtras bsf PORTA,2 ; PORTA 2 = 1 = Motor izquierdo atr. bcf PORTA,3 ; PORTA 3 = 0 = Motor izquierdo atr. return ;------------------------------------- IzquierdoDetenido bcf PORTA,2 ; PORTA 2 = 0 = Motor izquierdo det. bcf PORTA,3 ; PORTA 3 = 0 = Motor izquierdo det. return ;------------------------------------- Retardo1seg movlw d'0' ; Frecuencia de reloj = 4 MHz ; Retardo real = 1 seconds = 1000000 cycles ; Error = 0 % ;999997 cycles movlw d'8' ; 0x08 movwf d1 movlw d'47' ; 0x2F movwf d2 movlw d'3' ; 0x03 movwf d3 Retardo_01 decfsz d1, f goto $+2 decfsz d2, f goto $+2 decfsz d3, f goto Retardo_01 ; 3 ciclos más goto $+1 nop return ; ---------------------------- END </b></span> |
El archivo ASM se puede bajar de AQUÍ.
El insecto palo robótico HECTOR da sus primeros pasos
Un equipo de investigadores de la Universidad de Bielefeld ha tenido éxito en enseñarle la forma de caminar al único robot de su tipo en el mundo. Sus primeros pasos fueron registrados en un video. El robot se llama HECTOR y su construcción se basa en las formas de un insecto palo (Phasmatodea)

Con un diseño inspirado en los insectos, HECTOR tiene juntas elásticas pasivas y un exoesqueleto ultraligero. Lo que lo hace único es que está equipado con un gran número de sensores y que funciona de acuerdo con un concepto inspirado en la biología, un control reactivo descentralizado: el Walknet. Para el 2017, el robot andante estará equipado con habilidades adicionales dentro de un importante proyecto en el Centro de Excelencia de Tecnología de Interacción Cognitiva (CITEC).

El robot andante ha sido construido por el grupo de investigación en biomecatrónica. En el futuro, HECTOR servirá como una plataforma para los biólogos y expertos en robótica para poner a prueba las hipótesis sobre la locomoción animal. Un aspecto importante será la fusión de grandes cantidades de datos de los sensores de manera que el robot pueda caminar de modo más autónomo que antes. Una cuestión clave más será una óptima coordinación de los movimientos en un robot con articulaciones elásticas.
«La forma en que actúa la elasticidad en las unidades de HECTOR es comparable a la forma en que los músculos actúan en los sistemas biológicos», dice el profesor Dr. Axel Schneider. Él dirige el grupo de investigación biomecatrónica y coordina el proyecto CITEC junto con el Profesor Dr. Volker Dürr del Departamento de Cibernética Biológica de la Facultad de Biología. Schneider y su equipo desarrollaron sus propios actuadores elásticos. HECTOR tiene 18 de esos. Gracias a la elasticidad inspirada en la biología que poseen sus unidades, HECTOR puede adaptarse con flexibilidad a las propiedades de las superficies sobre las que camina.

«Sin embargo, la elasticidad por sí sola no es suficiente para que HECTOR pueda caminar a través de un entorno natural que contiene obstáculos», dice Schneider. «El reto era desarrollar un sistema de control que se encargara de coordinar los movimientos de sus patas en entornos difíciles, también».

El colega de Schneider Jan Paskarbeit fue responsable del desarrollo y la construcción del robot. Él también programó una versión virtual de HECTOR con el fin de poner a prueba enfoques de control experimental sin dañar el robot. «Todos los subsistemas tienen que comunicarse entre sí para que el robot camine sin ninguna dificultad», dice Paskarbeit. «De lo contrario, por ejemplo, HECTOR podría tener demasiadas patas en el aire al mismo tiempo, volverse inestable y caerse. Por otra parte, las patas tienen que ser capaces de reaccionar a las colisiones contra obstáculos. Hemos Solucionado esto implementando un comportamiento reflejo para subir por encima de los objetos», explica el investigador del CITEC.
En el Centro de Excelencia CITEC, ocho grupos de investigación se han unido durante tres años en un proyecto a gran escala para optimizar a HECTOR. Los científicos vienen de los campos de la informática, la biología, la física y la ingeniería.

En la actualidad, los investigadores están trabajando en el equipamiento de la sección frontal de HECTOR con sensores de largo alcance, como en una cabeza. Ya tienen un prototipo con dos cámaras laterales y dos antenas táctiles. Tanto el sistema visual como el táctil están inspirados en los de los insectos; sus espacios de funcionamiento y su resolución son similares a los de modelos animales.
«Un gran reto ahora será encontrar una forma eficaz de integrar estos sensores de largo alcance con los sensores de posición y los sensores de las articulaciones. HECTOR es la plataforma ideal de investigación para hacer esto», dice Volker Dürr.
A hexapod walker using a heterarchical architecture for action selection
Por otra parte, hasta la fecha Hector ha sido un sistema reactivo: Reacciona a los estímulos de su entorno; gracias al programa de software «Walknet” puede caminar con un paso de insecto; y gracias a otro programa llamado «Navinet» es capaz de encontrar el camino hacia cualquier objetivo distante. Pero Schillling y Cruse también han desarrollado un programa llamado «reaCog» que se activa cuando dos de los otros programas no son capaces de resolver un problema dado.
Este nuevo software permite al robot simular un «comportamiento imaginado» para resolver dicho problema: Héctor busca nuevas soluciones y evalúa si estas acciones tendrían sentido, en vez de completar automáticamente cualquier operación predeterminada. El hecho de ser capaz de imaginar acciones es una característica central de una forma simple de conciencia.
Autoconciencia
Pero en breve, además, Héctor demostrará cómo funciona la nueva arquitectura de software para él creada y que le proporcionará la “autoconciencia”. De momento, esta arquitectura solo ha sido probada en simulaciones informáticas.
Como explica Holk Cruse, «el ser humano posee conciencia reflexiva cuando no solo puede percibir lo que experimenta, sino que también tiene la capacidad de experimentar que está experimentando algo. Por tanto, la conciencia reflexiva existe si un sistema técnico o humano puede verse a sí mismo ‘desde fuera de sí mismo’, por así decirlo».
Cruse y Schilling han demostrado como puede surgir conciencia reflexiva de un robot. «Con el nuevo software, Héctor puede observar su estado mental interno —en cierta medida, sus estados de ánimo— y dirigir sus acciones, usando esta información», señala Schilling. Pero, además, estas facultades básicas estarán preparadas para que Héctor también sea capaz de evaluar el estado mental de otros. Así será “capaz de sentir las intenciones o expectativas de los demás, y actuar en consecuencia”, aseguran los investigadores.
Noticias relacionadas: