Investigadores rusos y sus colaboradores internacionales desarrollan una fotocélula bioelectrónica completamente funcional utilizando una molécula de una proteína fluorescente unida a un nanotubo de carbono.
Cuando se expone a la luz, el sistema puede cambiar sus propiedades electrónicas y funcionar emitiendo luz o como una célula de memoria, dependiendo de cómo se adjunte la proteína al tubo. Los hallazgos del equipo abren la puerta a nuevos elementos electrónicos, dispositivos de memoria y células solares ecológicos.
En láseres, diodos emisores de luz (LED) y algunos dispositivos de memoria se utilizan dispositivos optoelectrónicos capaces de almacenar y transmitir información respondiendo a varias longitudes de onda de luz. Son de particular interés los sistemas híbridos que contienen biomoléculas, como proteínas, junto con elementos electrónicos. Gracias a su bajo costo, seguridad ambiental y buen desempeño óptico, los sistemas híbridos pueden usarse como componentes en electrónica molecular, LED, láseres avanzados y transistores ópticos.
Microchip con un transistor bio-optoelectrónico
Investigadores del Instituto de Tecnología Electrónica de Moscú (MIET), el Instituto de Física Lebedev de RAS y el Instituto de Ciencia y Tecnología Skolkovo (Skoltech) en Moscú y sus colegas del Reino Unido, Finlandia y Serbia, modificaron nanotubos de carbono utilizando la proteína fluorescente verde (GFP).
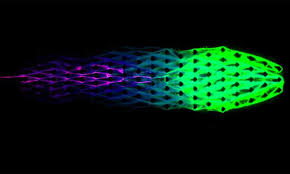
«En la configuración examinada, un nanotubo de carbono de pared simple (SWCNT) funciona como un conductor activo y portador de una molécula de proteína, mientras que el grupo de fenilazida proporciona un entrecruzamiento covalente para los portadores de carga comunes entre los componentes del dispositivo», explica el profesor de Skoltech Albert Nasibulin, jefe del Laboratorio de Nanomateriales.
Al observar la estructura de los compuestos resultantes, el equipo descubrió que la proteína puede ayudar a controlar el tipo de elemento optoelectrónico que resultará. Dado que el sistema puede intercambiar energía y portadores de carga con el medio ambiente, los autores aprovecharon esta capacidad para construir nuevos nanodispositivos.
“El nanotubo de carbono es indispensable para las estructuras de sensores biomímicos, ya que ayuda a registrar hasta los más mínimos cambios en la estructura y la carga de las biomoléculas individuales a las que está vinculado”, comenta Nikita Nekrasov, estudiante de posgrado en MIET.
Los nanotubos de carbono tienen muchos electrones libres que pueden migrar a la proteína GFP y regresar a través del puente de fenilazida. Los investigadores probaron diferentes opciones de fijación de la GFP, colocando el cilindro en posición vertical o lateral, para ver cómo se comportaba la fotocélula. Descubrieron que si la proteína se colocaba de lado con su lado repelente al agua unido al tubo, todo el sistema se comportaba como un foco que controlaba la conductividad del tubo. Esto sucede porque encender y apagar la luz de excitación provoca un intenso intercambio de electrones entre el nanotubo y la proteína. En cambio, si se unía al tubo la parte de absorción de agua de la proteína, la carga quedaba atrapada entre el nanotubo y la proteína, lo que permitía que el dispositivo almacenara información durante docenas de minutos. A la vez, el elemento permaneció estable durante mucho tiempo gracias a la cubierta proteica protectora.
“Nuestros hallazgos ayudarán a crear dispositivos controlados por luz potentes y compactos para el almacenamiento y transmisión de información. Además, ambas partes de nuestros elementos son biodegradables y, por lo tanto, se pueden utilizar para crear células solares amigables con el medio ambiente”, señala Ivan Bobrinetsky, Doctor en Ciencias Técnicas, director de proyectos de subvenciones de RSF e investigador principal de MIET.
________________________________________
Artículo original: La investigación, que fue apoyada por una subvención de la Russian Science Foundation (RSF), se publicó en la revista Advanced Functional Materials